



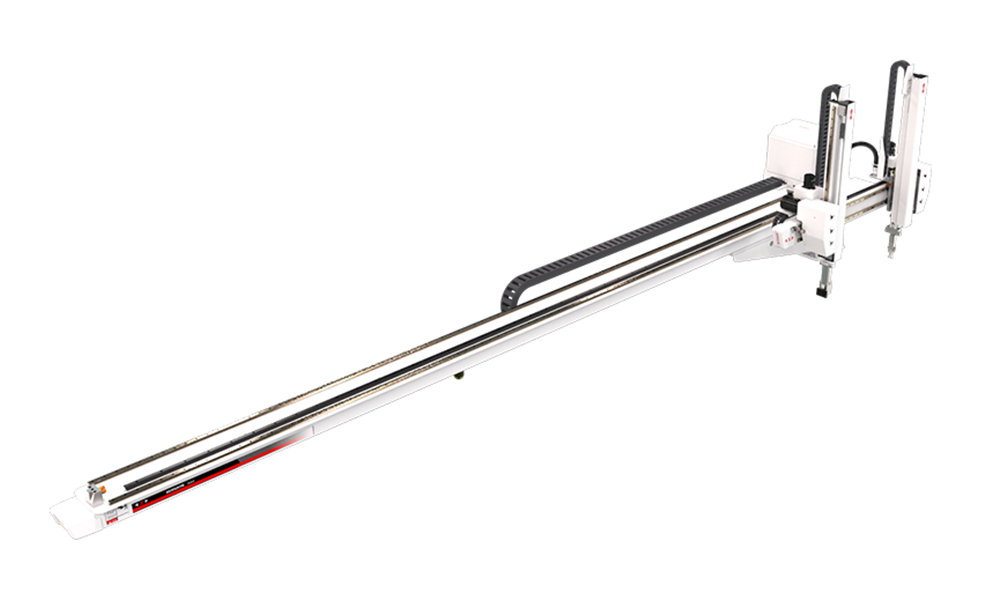
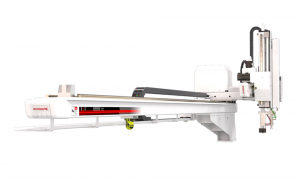
A serie BRTV13WDS5P0/F0 aplícase a todos os tipos de gamas de máquinas de inxección horizontais de 320T-700T para produtos para levar e bebedoiros. A instalación é diferente dos robots tradicionais de feixe, os produtos colócanse ao final das máquinas de moldeo por inxección. Ten un brazo dobre. O brazo vertical é unha plataforma telescópica e a carreira vertical é de 1300 mm. Servoaccionamento AC de cinco eixes. Despois da instalación, o espazo de instalación do eyector pódese aforrar nun 30-40% e a planta pódese utilizar máis plenamente, permitindo unha mellor utilización do espazo de produción, a produtividade aumentará nun 20-30%, reducirá a taxa de defectos, garantirá o seguridade dos operadores, reducir a man de obra e controlar con precisión a saída para reducir os residuos. Sistema integrado de controlador e controlador de cinco eixes: menos liñas de sinal, comunicación a longa distancia, bo rendemento de expansión, forte capacidade anti-interferencia, alta precisión de posicionamento repetido, pode controlar simultaneamente varios eixes, mantemento sinxelo do equipo e baixa taxa de fallos.

Posicionamento preciso

Rápido

Larga vida útil

Baixa taxa de fallos

Reducir o traballo

Telecomunicación
| Fonte de enerxía (kVA) | IMM recomendado (ton) | Impulsado por Travesía | Modelo de EOAT |
| 3.40 | 320T-700T | Servomotor AC | dúas aspiracións dous accesorios |
| Carreira transversal (mm) | Carreira transversal (mm) | Carreira vertical (mm) | Carga máx. (kg) |
| Arco horizontal cunha lonxitude total inferior a 6 metros | pendente | 1300 | 8 |
| Tempo de saída en seco (s) | Tempo de ciclo seco (s) | Consumo de aire (NI/ciclo) | Peso (kg) |
| 2.3 | pendente | 9 | Non estándar |
Representación do modelo: W: tipo telescópico. D: brazo do produto + brazo corredor. S5: cinco eixes accionados por servomotor CA (eixe transversal, eixe vertical + eixe transversal).
O tempo de ciclo mencionado anteriormente son os resultados do estándar de proba interno da nosa empresa. No proceso de aplicación real da máquina, variarán segundo o funcionamento real.

| A | B | C | D | E | F | G | O |
| 1614 | ≤ 6 m | 162 | pendente | pendente | pendente | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | pendente | pendente | 253,5 | 399 | pendente | 549 | pendente |
| Q | |||||||
| 1300 | |||||||
Non hai máis aviso se a especificación e o aspecto se modifican debido a melloras e outros motivos. Grazas pola túa comprensión.

1. Cambio de estado
O colgante didáctico do brazo manipulador de moldaxe por inxección de plástico ten tres estados: manual, parado e automático. [Manual]: para entrar no modo Manual, move o interruptor de estado cara á esquerda. [Parar]: para entrar no estado de parada, move o interruptor de estado ao centro. Nesta fase pódense establecer parámetros. [Auto]: para entrar no estado Auto, move o interruptor de estado ao centro. Nesta condición pódense realizar axustes automáticos e correspondentes.
2. Botóns de función
Botón [Inicio]:
Función 1: no modo automático, prema "Inicio" para iniciar o manipulador automaticamente.
Función 2: no estado de parada, prema "Orixe" e despois "Iniciar" para restaurar o manipulador á orixe.
Función 3: no estado de parada, prema "HP" e despois "Iniciar" para restablecer a orixe do manipulador.
Botón [Parar]:
Función 1: no modo automático, prema "Parar" e a aplicación pararase cando remate o módulo. Función 2: cando se produza unha alerta, toque "Deter" no modo automático para borrar a visualización da alarma resolta.
Botón [Orixe]: só é aplicable ás accións de referencia. Consulte a Sección 2.2.4 "Método de localización".
Botón [HP]: prema "HP" e despois "Iniciar, todos os eixes restableceranse na orde de Y1, Y2 Z, X1 e X2, Y1 e Y2 volverán a 0 e Z, X1 e X2 volverán ao inicio. posición do programa.
Botón [Speed Up/Down]: Estes dous botóns pódense usar para axustar a velocidade global no estado Manual e Auto.
Botón [Parada de emerxencia]: en caso de emerxencia, ao premer o botón "Parada de emerxencia" apagarase todos os eixes e emitirá a alerta de "Parada de emerxencia". Despois de quitar o botón, prema a tecla "Parar" para silenciar a alarma.

-

Moldeo por inxección
Categorías de produtos
-
Servomanipulador de alta precisión de cinco eixes BRTV0...
-

Robot de inxección de moldeo industrial lineal BRTR0...
-

Manipulador de alta velocidade para inxección de moldes BRTR0...
-

Manipulador industrial lineal servo AC BRTR09WD...
-

Manipulador de servo inyección AC de cinco eixes BRTR13...
-

Robot manipulador cartesiano de velocidade rápida BRTR17WD...
Integradores BORUNTE e BORUNTE
No ecosistema BORUNTE, BORUNTE é responsable da I+D, produción e venda de robots e manipuladores. Os integradores de BORUNTE utilizan as súas vantaxes da industria ou do campo para ofrecer deseño de aplicacións de terminal, integración e servizo posvenda para os produtos BORUNTE que venden. Os integradores de BORUNTE e BORUNTE cumpren as súas respectivas responsabilidades e son independentes entre si, traballando xuntos para promover o brillante futuro de BORUNTE.
- Teléfono: +86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Ventosas de esponxa, Sistema visual 2D, Compensador de posición de forza axial, Husillo neumático flotante neumático, Husillo eléctrico flotante neumático, Divisor non magnético,
-

vr
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba