
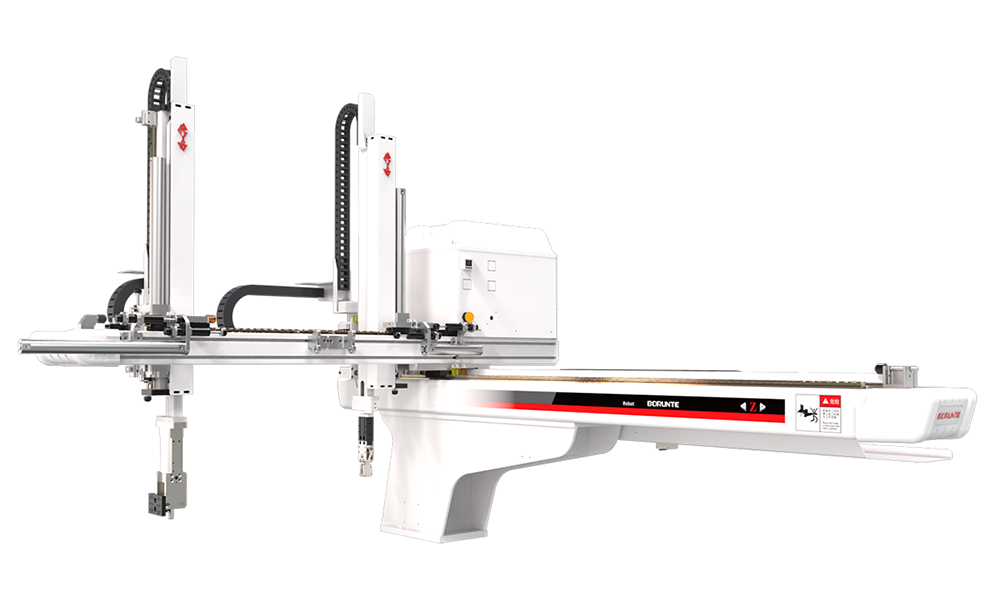



O brazo robótico de travesía BRTB06WDS1P0/F0 aplícase a todo tipo de gamas de máquinas de inxección horizontais de 120T-250T para produtos para levar e sprue. Sistema de control integrado de control de condución dun só eixe: menos liñas de sinal, comunicación a longa distancia, bo rendemento de expansión, forte capacidade antiinterferencias, alta precisión de posicionamento repetido, pode controlar varios eixes ao mesmo tempo, mantemento do equipo sinxelo e menos fallos. taxa.

Posicionamento preciso

Rápido

Larga vida útil

Baixa taxa de fallos

Reducir o traballo

Telecomunicación
| Fonte de enerxía (KVA) | IMM recomendado (ton) | Impulsado por Travesía | Modelo de EOAT |
| 1,69 | 120T-250T | Servomotor AC | Unha succión un accesorio |
| Carreira transversal (mm) | Carreira transversal (mm) | Carreira vertical (mm) | Carga máx. (kg) |
| 1250 | P: 300-R: 125 | 800 | 3 |
| Tempo de saída en seco (s) | Tempo de ciclo seco (s) | Consumo de aire (NI/ciclo) | Peso (kg) |
| 1.7 | 6.49 | 3.5 | 198 |
Representación do modelo: W: tipo telescópico. D: Brazo produto + brazo corredor. S5: cinco eixes accionados por servomotor CA (eixe transversal, eixe vertical + eixe transversal).
O tempo de ciclo mencionado anteriormente son os resultados do estándar de proba interno da nosa empresa. No proceso de aplicación real da máquina, variarán segundo o funcionamento real.

| A | B | C | D | E | F | G | H |
| 1340 | 2044 | 800 | 388 | 1250 | 354 | 165 | 210 |
| I | J | K | L | M | N | O | |
| 135 | 475 | 520 | 1190 | 225 | 520 | 1033 |
Non hai máis aviso se a especificación e o aspecto se modifican debido a melloras e outros motivos. Grazas pola túa comprensión.

Servomanipulador dun eixe BRTB08WDS1P0F0 Instalación do sistema
1) Os traballos de cableado deben ser realizados por un electricista profesional.
2) Asegúrese de que a alimentación está desconectada antes de comezar a operación.
3) Instálao en materiais ignífugos como o metal e mantéñase lonxe de materiais combustibles.
4) Debe estar conectado a terra de forma segura cando se use.
5) Se a fonte de alimentación externa é anormal, o sistema de control fallará. Para que todo o sistema funcione con seguridade, asegúrese de configurar o circuíto de seguridade fóra do sistema de control. Manipulador multi-eixo de moldeo por inxección BORUNTE Sistema de control de moldeo por inyección Multi-eix 269.
6) Antes da instalación, cableado, operación e mantemento, o operador debe estar familiarizado co contido deste manual. Tamén é necesario comprender completamente os coñecementos mecánicos e electrónicos relevantes e todas as precaucións de seguridade relacionadas.
7) A caixa de control eléctrico para a instalación do controlador debe estar ben ventilada, a proba de aceite e a proba de po. Se a caixa de control eléctrico é hermética, é probable que a temperatura do controlador sexa demasiado alta, o que afectará o traballo normal. Polo tanto, debe instalarse un ventilador de escape. A temperatura adecuada na caixa de control eléctrico é inferior a 50 °C. Non o use en lugares con condensación e conxelación.
8) O controlador non debe instalarse demasiado preto do contactor, transformador e outros accesorios de CA para evitar interferencias de sobretensión innecesarias. Precaución: un manexo inadecuado pode causar perigos, incluíndo lesións persoais ou accidentes de máquinas.

-
Moldeo por inxección




Integradores BORUNTE e BORUNTE
No ecosistema BORUNTE, BORUNTE é responsable da I+D, produción e venda de robots e manipuladores. Os integradores de BORUNTE utilizan as súas vantaxes da industria ou do campo para ofrecer deseño de aplicacións de terminal, integración e servizo posvenda para os produtos BORUNTE que venden. Os integradores de BORUNTE e BORUNTE cumpren as súas respectivas responsabilidades e son independentes entre si, traballando xuntos para promover o brillante futuro de BORUNTE.
- Teléfono: +86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Divisor non magnético, Husillo eléctrico flotante neumático, Sistema visual 2D, Husillo neumático flotante neumático, Ventosas de esponxa, Compensador de posición de forza axial,
-

vr
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba