




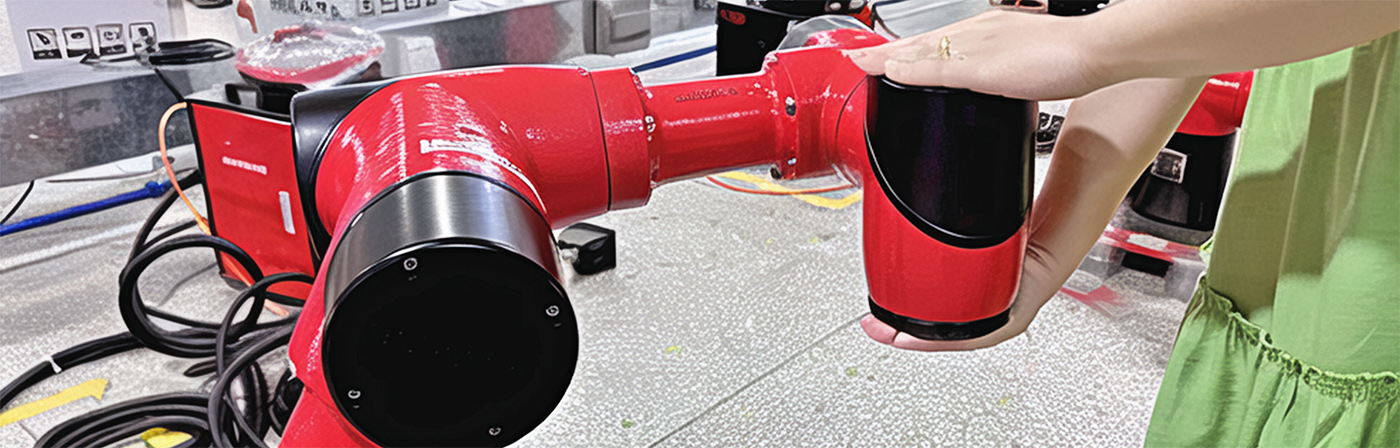
BRTIRXZ0805A é un robot cooperativo de seis eixes con función de arrastre desenvolvido de forma independente por BORUNTE. cunha carga máxima de 5 kg e unha lonxitude máxima do brazo de 930 mm. Ten as funcións de detección de colisións e reprodución de pistas. É seguro e eficiente, intelixente e fácil de usar, flexible e lixeiro, económico e fiable, baixo consumo de enerxía e outras características, que satisfacen en gran medida as necesidades de cooperación home-máquina. A súa alta sensibilidade e resposta rápida pódense aplicar á liña de produción flexible de alta densidade, para satisfacer as necesidades de envasado de produtos, moldaxe por inxección, carga e descarga, montaxe e outras operacións, especialmente para a demanda de aplicacións de traballo colaborativo home-máquina. O grao de protección alcanza IP50. A proba de po e a proba de auga. A precisión de posicionamento repetida é de ± 0,1 mm.

Posicionamento preciso

Rápido

Larga vida útil

Baixa taxa de fallos

Reducir o traballo

Telecomunicación
| Elemento | Rango | Velocidade máxima | ||
| Brazo | J1 | ± 180° | 180°/s | |
| J2 | ±90° | 180°/s | ||
| J3 | -70°~+240° | 180°/s | ||
| Pulso | J4 | ± 180° | 180°/s | |
| J5 | ± 180° | 180°/s | ||
| J6 | ± 360° | 180°/s | ||
|
| ||||
| Lonxitude do brazo (mm) | Capacidade de carga (kg) | Precisión de posicionamento repetida (mm) | Fonte de enerxía (kVA) | Peso (kg) |
| 930 | 5 | ± 0,05 | 0,76 | 28 |

Características de BRTIRXZ0805A
1.A colaboración entre humanos e máquinas é máis segura: o sensor de par de alta fiabilidade incorporado con función de detección de colisións pode garantir de forma eficiente a seguridade da colaboración humano-máquina, sen necesidade de illamento de cercas, aforrando moito espazo.
2.Fácil control e ensinanza de arrastre: a programación pódese conseguir arrastrando a traxectoria ou usando a gravación visual sensible en 3D da traxectoria obxectivo, que é sinxela e fácil de usar;
3.Estrutura lixeira, portátil e sinxela: deseñado cunha estrutura lixeira, todo o robot pesa menos de 35 kg e está equipado cun módulo altamente integrado, o que simplifica moito a estrutura interna do corpo e facilita a desmontaxe e a montaxe.
4.Económicamente e eficiente: deseño de robot fermoso e baixo custo. Ten un investimento inicial baixo, unha alta rendibilidade, movementos flexibles e suaves e unha velocidade máxima de 2,0 m/s.
5.Características de seguridade: as funcións de seguridade avanzadas, como a detección de colisións e a vixilancia da forza, adoitan estar integradas nestes robots, o que garante un funcionamento seguro nas proximidades dos traballadores humanos. Isto fai que sexan axeitados para aplicacións de robots colaborativos (cobots), onde os humanos e os robots traballan xuntos.
Condicións de traballo de BRTIRXZ0805A
1, fonte de alimentación: armario de control AC: 220V±10% 50HZ/60HZ,corpo DC:48V±10%
2、Temperatura de funcionamento: 0℃-45℃; Temperatura de batida: 15℃-25℃
3 、 Humidade relativa: 20-80% RH (sen condensación)
4、Ruído: ≤75dB(A)



-
Colaboración humana máquina
-

Moldeo por inxección
-

transporte
-
montaxe





Integradores BORUNTE e BORUNTE
No ecosistema BORUNTE, BORUNTE é responsable da I+D, produción e venda de robots e manipuladores. Os integradores de BORUNTE utilizan as súas vantaxes da industria ou do campo para ofrecer deseño de aplicacións de terminal, integración e servizo posvenda para os produtos BORUNTE que venden. Os integradores de BORUNTE e BORUNTE cumpren as súas respectivas responsabilidades e son independentes entre si, traballando xuntos para promover o brillante futuro de BORUNTE.
- Teléfono: +86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Husillo neumático flotante neumático, Sistema visual 2D, Divisor non magnético, Ventosas de esponxa, Compensador de posición de forza axial, Huso eléctrico flotante neumático,
-

vr
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba