



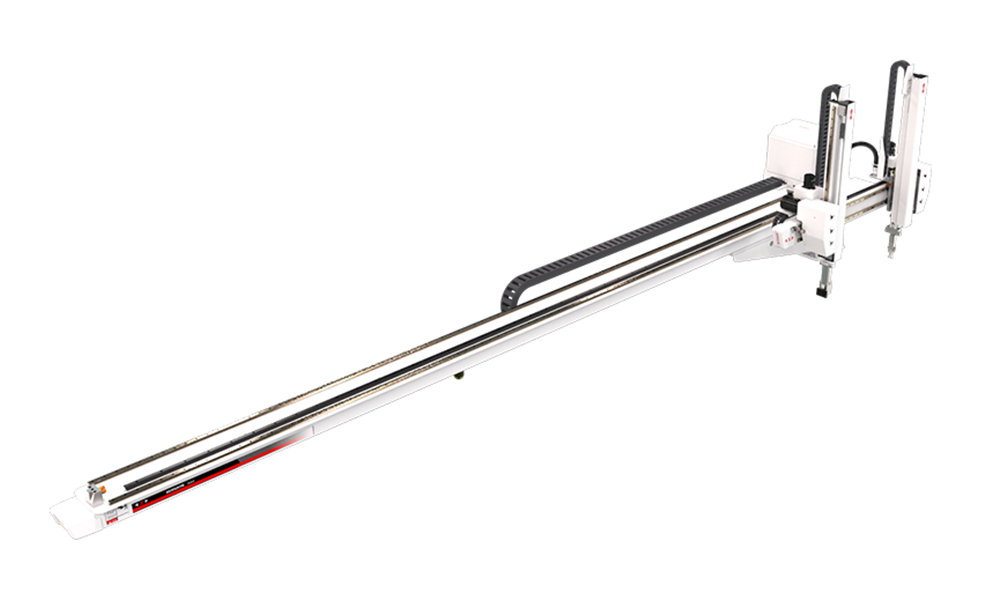
BRTV13WDS5P0 / F0 rige jildt foar alle soarten fan horizontale ynjeksje masine berik fan 320T-700T foar take-out produkten en sprue. De ynstallaasje is oars as tradisjonele beam robots, produkten wurde pleatst oan 'e ein fan ynjeksje moulding masines. It hat in dûbele earm. De fertikale earm is in teleskopyske poadium en de fertikale slach is 1300mm. Fiif assen AC servo drive. Nei ynstallaasje kin de ynstallaasjeromte fan 'e ejector wurde bewarre troch 30-40%, en de plant kin folsleiner brûkt wurde, wêrtroch bettere benutting fan produksjeromte kin wurde, produktiviteit wurdt ferhege mei 20-30%, ferminderje it defekte taryf, soargje foar de feiligens fan operators, ferminderjen manpower en sekuer kontrolearje de útfier te ferminderjen ôffal. Fiif assen bestjoerder en controller yntegrearre systeem: minder sinjaal rigels, lange-ôfstân kommunikaasje, goede útwreiding prestaasjes, sterke anty-ynterferinsje fermogen, hege krektens fan werhelle posysjonearring, kin tagelyk behearskje meardere assen, ienfâldige apparatuer ûnderhâld, en lege falen rate.

Akkurate posysje

Fluch

Lang Service Life

Low Failure Rate

Ferminderje Arbeid

Telekommunikaasje
| Stromboarne (kVA) | Oanrikkemandearre IMM (ton) | Traverse Driven | Model fan EOAT |
| 3.40 | 320T-700T | AC Servo motor | twa suctions twa fixtures |
| Traverse Stroke (mm) | Crosswise Stroke (mm) | Fertikale streek (mm) | Max.lading (kg) |
| Horizontale bôge mei in totale lingte fan minder as 6 meter | yn ôfwachting | 1300 | 8 |
| Dry Take Out Tiid (sek) | Dry Cycle Tiid (sek) | Luchtferbrûk (NI/syklus) | Gewicht (kg) |
| 2.3 | yn ôfwachting | 9 | Non-standert |
Modelfertsjintwurdiging: W: Teleskopysk type. D: Produktarm + runnerarm. S5: Fiif-as oandreaun troch AC Servo Motor (Traverse-as, Fertikale-as + Crosswise-as).
De hjirboppe neamde syklustiid binne de resultaten fan 'e ynterne teststandert fan ús bedriuw. Yn it eigentlike oanfraachproses fan 'e masine sille se ferskille neffens de eigentlike operaasje.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | yn ôfwachting | yn ôfwachting | yn ôfwachting | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | yn ôfwachting | yn ôfwachting | 253,5 | 399 | yn ôfwachting | 549 | yn ôfwachting |
| Q | |||||||
| 1300 | |||||||
Gjin fierdere notice as de spesifikaasje en uterlik wurde feroare fanwege ferbettering en oare redenen. Tankewol foar jo begryp.

1. State Switch
De learhanger fan 'e plestik ynjeksjefoarmjende manipulatorarm hat trije statusen: Hânlieding, Stopje en Auto. [Hânlieding]: Om de Hânlieding yn te gean, ferpleatse de steatskeakel nei lofts. [Stopje]: Om de Stop-tastân yn te gean, ferpleatse de steatskeakel nei it sintrum. Parameters kinne wurde ynsteld yn dit stadium. [Auto]: Om de Auto-tastân yn te gean, ferpleatse de steatskeakel nei it sintrum. Automatyske en oerienkommende ynstellings kinne wurde útfierd yn dizze tastân.
2. Funksje Knoppen
[Start] knop:
Funksje 1: Druk yn 'e Auto-modus op "Start" om de manipulator automatysk te begjinnen.
Funksje 2: Druk yn 'e Stop-state op "Oarsprong" en dan op "Start" om de manipulator werom te setten nei de oarsprong.
Funksje 3: Druk yn 'e stopstân op "HP" en dan op "Start" om de oarsprong fan 'e manipulator werom te setten.
[Stopje] knop:
Funksje 1: Druk yn Auto-modus op "Stopje" en de applikaasje sil stopje as de module klear is. Funksje 2: As der in warskôging optreedt, tik dan op "Stopje" yn 'e Auto-modus om it oploste alarmdisplay te wiskjen.
[Oarsprong] knop: It is allinnich fan tapassing op homing aksjes. Sjoch asjebleaft nei paragraaf 2.2.4 "Homingmetoade".
[HP] knop: Druk op "HP" en dan "Start, alle assen sille weromsette yn 'e folchoarder fan Y1, Y2 Z, X1 en X2, Y1 en Y2 sille werom nei 0, en Z, X1 en X2 sille werom nei de start posysje fan it programma.
Knop [Speed Up / Down]: Dizze twa knoppen kinne brûkt wurde om de globale snelheid oan te passen yn Hânlieding en Auto-status.
Knop [Emergency Stop]: Yn in need, druk op de "Emergency Stop" knop sil alle assen útsette en de warskôging "Emergency Stop" klinke. Nei it fuortheljen fan de knop, druk op de "Stop" kaai om it alarm stil te meitsjen.

-

Injection Molding
Products kategoryen
-
Fiif assen hege krektens servo Manipulator BRTV0 ...
-

Lineêre yndustriële moulding ynjeksje robot BRTR0 ...
-

Hege snelheid manipulator foar schimmel ynjeksje BRTR0 ...
-

AC servo lineêre yndustriële manipulator BRTR09WD ...
-

Fiif assen AC servo ynjeksje manipulator BRTR13 ...
-

Fast Speed Cartesian Robot Manipulator BRTR17WD ...
BORUNTE en BORUNTE integrators
Yn it BORUNTE-ekosysteem is BORUNTE ferantwurdlik foar de R&D, produksje en ferkeap fan robots en manipulators. BORUNTE-yntegrators brûke har yndustry- as fjildfoardielen om terminalapplikaasjeûntwerp, yntegraasje en tsjinst nei ferkeap te leverjen foar de BORUNTE-produkten dy't se ferkeapje. BORUNTE- en BORUNTE-yntegrators ferfolje har respektivelike ferantwurdlikheden en binne ûnôfhinklik fan elkoar, wurkje gear om de ljochte takomst fan BORUNTE te befoarderjen.
- Tel: +86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Sina
- borunterobotcoltd@gmail.com



Spons suction cups, 2D fisueel systeem, Axiale krêft posysje kompensator, Pneumatyske driuwende pneumatyske spindel, Pneumatyske driuwende elektryske spil, Net magnetyske splitter,
-

vr
-

email
-

Tillefoan
-

Whatsapp
-

Top