



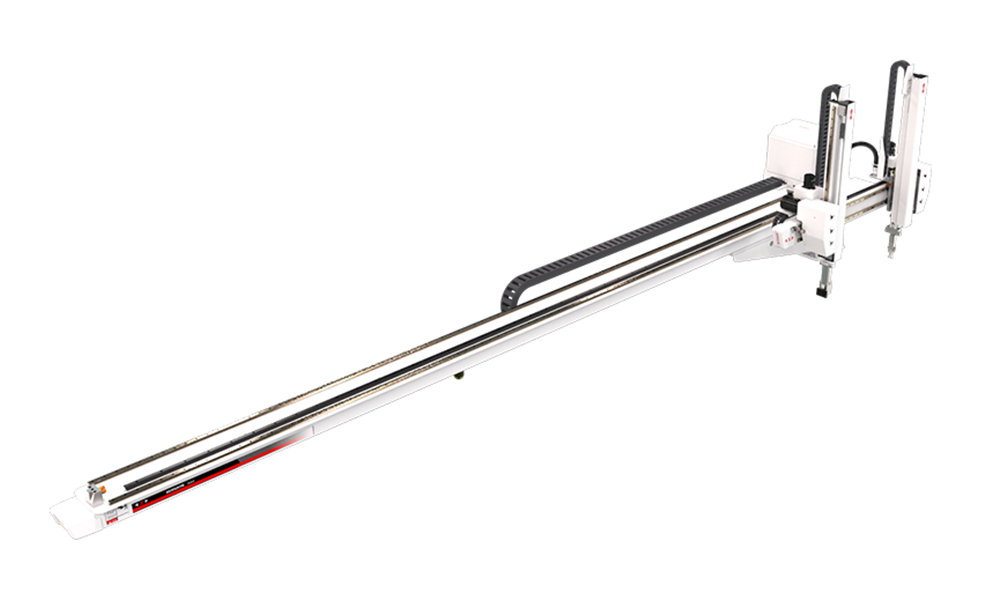
سری BRTV13WDS5P0/F0 برای همه انواع ماشین های تزریق افقی 320T-700T برای محصولات بیرون کش و اسپرو کاربرد دارد. نصب با ربات های پرتو سنتی متفاوت است، محصولات در انتهای ماشین های قالب گیری تزریق قرار می گیرند. دو بازو دارد. بازوی عمودی یک مرحله تلسکوپی و ضربه عمودی 1300 میلی متر است. درایو سروو AC پنج محوره. پس از نصب، فضای نصب اجکتور را می توان 30-40٪ صرفه جویی کرد و می توان از کارخانه به طور کامل استفاده کرد تا امکان استفاده بهتر از فضای تولید فراهم شود، بهره وری 20-30٪ افزایش می یابد، نرخ نقص را کاهش می دهد، اطمینان حاصل شود که ایمنی اپراتورها، کاهش نیروی انسانی و کنترل دقیق خروجی برای کاهش ضایعات. سیستم یکپارچه راننده و کنترلر پنج محوره: خطوط سیگنال کمتر، ارتباط از راه دور، عملکرد انبساط خوب، توانایی ضد تداخل قوی، دقت بالای موقعیت یابی مکرر، می تواند به طور همزمان چندین محور را کنترل کند، تعمیر و نگهداری تجهیزات ساده و میزان خرابی کم.

موقعیت یابی دقیق

سریع

عمر طولانی خدمات

نرخ شکست پایین

کاهش نیروی کار

مخابرات
| منبع تغذیه (kVA) | IMM توصیه شده (تن) | تراورس رانده | مدل EOAT |
| 3.40 | 320T-700T | موتور AC سروو | دو مکش دو فیکسچر |
| تراورس استروک (میلی متر) | ضربدری (میلی متر) | ضربه عمودی (میلی متر) | حداکثر بارگیری (کیلوگرم) |
| طاق افقی با طول کلی کمتر از 6 متر | در انتظار | 1300 | 8 |
| زمان بیرون آوردن خشک (ثانیه) | زمان چرخه خشک (ثانیه) | مصرف هوا (NI/چرخه) | وزن (کیلوگرم) |
| 2.3 | در انتظار | 9 | غیر استاندارد |
نمایش مدل: W:نوع تلسکوپی. D: بازوی محصول + بازوی دونده. S5: پنج محوری که توسط سروو موتور AC هدایت می شود (محور تراورس، محور عمودی + محور متقاطع).
زمان چرخه ذکر شده در بالا نتایج استاندارد تست داخلی شرکت ما است. در فرآیند کاربرد واقعی دستگاه، آنها با توجه به عملکرد واقعی متفاوت خواهند بود.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6 متر | 162 | در انتظار | در انتظار | در انتظار | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | در انتظار | در انتظار | 253.5 | 399 | در انتظار | 549 | در انتظار |
| Q | |||||||
| 1300 | |||||||
در صورت تغییر مشخصات و ظاهر به دلیل بهبود و دلایل دیگر، اطلاع دیگری وجود ندارد. از درک شما متشکرم.

1. سوئیچ حالت
آویز آموزشی بازوی بازوی قالب گیری تزریق پلاستیک دارای سه وضعیت دستی، توقف و خودکار است. [دستی]: برای وارد شدن به حالت دستی، کلید حالت را به سمت چپ حرکت دهید. [توقف]: برای وارد شدن به حالت توقف، کلید حالت را به مرکز حرکت دهید. پارامترها را می توان در این مرحله تنظیم کرد. [خودکار]: برای وارد شدن به حالت خودکار، کلید حالت را به مرکز حرکت دهید. تنظیمات خودکار و مربوطه را می توان در این شرایط انجام داد.
2. دکمه های تابع
دکمه [شروع]:
عملکرد 1: در حالت خودکار، "شروع" را فشار دهید تا دستکاری کننده به طور خودکار راه اندازی شود.
عملکرد 2: در حالت Stop، "Origin" و سپس "Start" را فشار دهید تا دستکاری کننده به مبدا بازگردد.
عملکرد 3: در حالت Stop، "HP" و سپس "Start" را فشار دهید تا مبدا دستکاری کننده بازنشانی شود.
دکمه [توقف]:
عملکرد 1: در حالت خودکار، "توقف" را فشار دهید و پس از اتمام ماژول، برنامه متوقف می شود. عملکرد 2: هنگامی که یک هشدار رخ می دهد، روی "توقف" در حالت خودکار ضربه بزنید تا صفحه نمایش هشدار حل شده پاک شود.
دکمه [Origin]: فقط برای اقدامات خانگی قابل اجرا است. لطفاً به بخش 2.2.4 "روش خانه سازی" مراجعه کنید.
دکمه [HP]: "HP" را فشار دهید و سپس "شروع، همه محورها به ترتیب Y1، Y2 Z، X1 و X2 بازنشانی می شوند، Y1 و Y2 به 0 برمی گردند، و Z، X1 و X2 به شروع باز می گردند. موقعیت برنامه
دکمه [Speed Up/Down]: از این دو دکمه می توان برای تنظیم سرعت جهانی در حالت Manual و Auto استفاده کرد.
دکمه [توقف اضطراری]: در مواقع اضطراری، با فشار دادن دکمه "توقف اضطراری" همه محورها خاموش می شود و هشدار "توقف اضطراری" به صدا در می آید. پس از برداشتن دستگیره، کلید "Stop" را فشار دهید تا زنگ هشدار خاموش شود.

-

قالب گیری تزریقی





ادغام کننده های BORUNTE و BORUNTE
در اکوسیستم BORUNTE، BORUNTE مسئول تحقیق و توسعه، تولید و فروش رباتها و دستکاریکنندگان است. یکپارچهکنندههای BORUNTE از مزیتهای صنعتی یا میدانی خود برای ارائه طراحی برنامه ترمینال، یکپارچهسازی و خدمات پس از فروش برای محصولات BORUNTE که میفروشند، استفاده میکنند. ادغام کنندگان BORUNTE و BORUNTE مسئولیت های مربوطه خود را انجام می دهند و مستقل از یکدیگر هستند و با هم کار می کنند تا آینده روشن BORUNTE را ارتقا دهند.
- تلفن: +86-400-870-8989
- NO.83، جاده شافو، روستای شابو، شهر دالانگ، شهر دونگوان، استان گوانگدونگ، چین
- borunterobotcoltd@gmail.com



مکنده اسفنجی, سیستم بصری دو بعدی, جبران کننده موقعیت نیروی محوری, دوک پنوماتیک شناور پنوماتیک, اسپیندل الکتریکی شناور پنوماتیک, اسپلیتر غیر مغناطیسی,
-

vr
-

ایمیل
-

تلفن
-

واتساپ
-

بالا