BRTIRPH1210A on kuueteljeline robot, mille BORUNTE on välja töötanud keevitus-, jämedus- ja lihvimisrakenduste tööstusele. See on kompaktse kujuga, väikese suurusega, kerge kaal, maksimaalne koormus 10 kg ja käeulatus 1225 mm. Selle randmel on õõnes struktuur, mis muudab juhtmestiku mugavamaks ja liikumise paindlikumaks. Esimene, teine ja kolmas liigend on kõik varustatud ülitäpse reduktoriga ning neljas, viies ja kuues liigend on kõik varustatud ülitäpsete hammasrataste konstruktsioonidega. Kiire ühenduskiirus võimaldab paindlikku tööd. Kaitseaste ulatub IP54-ni. Tolmu- ja veekindel. Korduspositsioneerimise täpsus on ±0,07 mm.

Täpne positsioneerimine

Kiire

Pikk kasutusiga

Madal rikete määr

Tööjõu vähendamine

Telekommunikatsioon
| Üksus | Vahemik | Max kiirus | ||
| Arm | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Randme | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Käe pikkus (mm) | Laadimisvõime (kg) | Korduv positsioneerimise täpsus (mm) | Toiteallikas (kVA) | Kaal (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Mis kasu on professionaalse poleerimisega robotkäe ostmisest? BORUNTE poleerimistööstusrobotid võivad parandada tootmise efektiivsust, parandada toodete kvaliteeti, vähendada tööjõukulusid ja inimlike vigade riske, need võivad töötada kõrgel temperatuuril, kahjulike gaaside ja muudes keskkondades, et tagada turvalisem töökeskkond. 2. Kuidas valida oma vajadustele vastav poleerimistööstusrobot? Roboti valikul tuleks arvestada järgmiste teguritega: töökoormus, tööruum, täpsusnõuded, töökiirus, ohutusnõuded, programmeerimise ja töö lihtsus, hooldusnõuded ja eelarvepiirangud. Samas tuleks täpsemate ettepanekute saamiseks läbi viia konsultatsioone ka tarnijate ja spetsialistidega. Professionaalse poleerimisega robotkäe olulised omadused: 1. Täpsus ja korratavus: poleerimistööd nõuavad tavaliselt väga täpset liikumist ja järjepidevat tööd. Tööstusrobotid suudavad positsioneerida ja juhtida millimeetrise taseme täpsusega, tagades igas toimingus ühtlased tulemused. 2. Automatiseerimine ja efektiivsus: Tööstusrobotite üks peamisi eesmärke on parandada tootmise efektiivsust. Poleerimisprotsess on tavaliselt tülikas ja aeganõudev, kuid robotid suudavad ülesandeid täita kiiresti ja järjepidevalt, parandades seeläbi tootmisliini üldist efektiivsust. 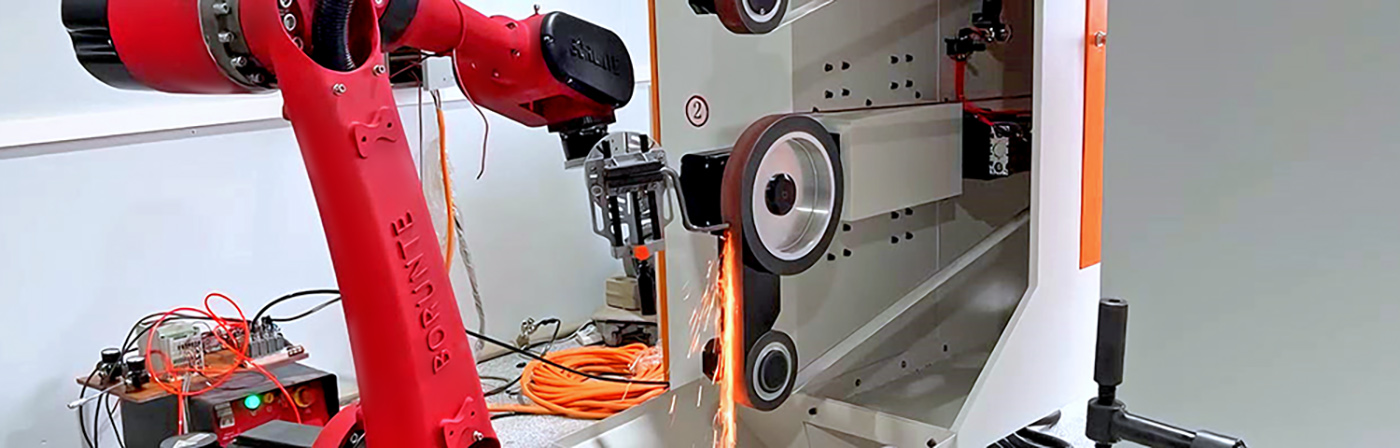  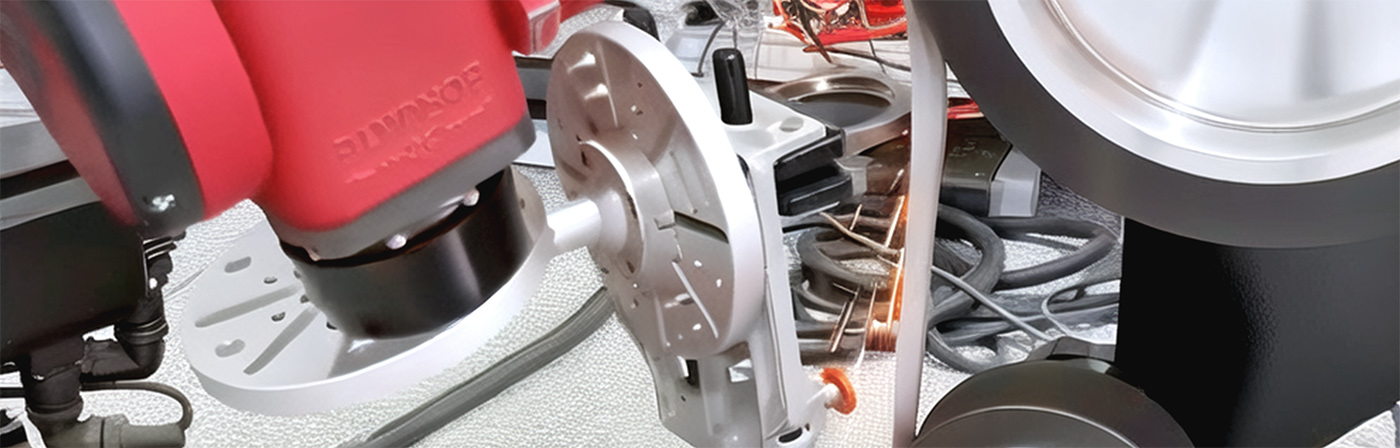 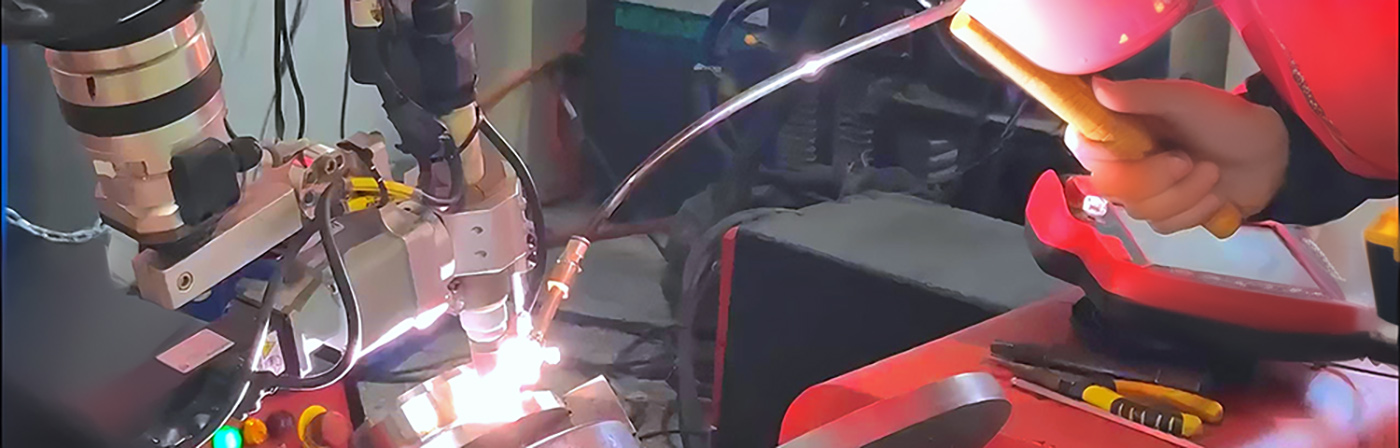
Toodete kategooriadBORUNTE ja BORUNTE integraatoridBORUNTE ökosüsteemis vastutab BORUNTE robotite ja manipulaatorite uurimis- ja arendustegevuse, tootmise ja müügi eest. BORUNTE integraatorid kasutavad oma valdkonna või valdkonna eeliseid, et pakkuda nende müüdavate BORUNTE toodete jaoks terminalirakenduste disaini, integreerimist ja müügijärgset teenindust. BORUNTE ja BORUNTE integraatorid täidavad oma vastavaid kohustusi ja on üksteisest sõltumatud, tehes koostööd BORUNTE helge tuleviku edendamiseks.
© Autoriõigus - 2010-2024 : Kõik õigused kaitstud.Saidikaart - AMP Mobile Pneumaatiline ujuv elektriline spindel, Mittemagnetiline jaotur, Svamm iminapad, Pneumaatiline ujuv pneumaatiline spindel, Aksiaaljõu asendi kompensaator, 2D visuaalne süsteem,
|