



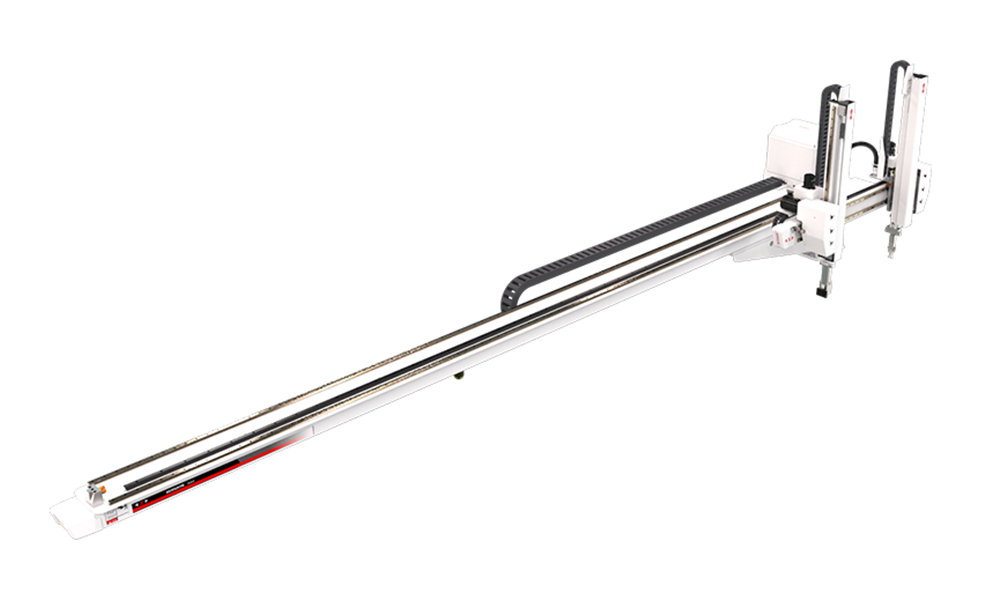
La serie BRTV13WDS5P0/F0 se aplica a todos los tipos de máquinas de inyección horizontales de 320T-700T para productos para llevar y bebederos. La instalación se diferencia de los robots de vigas tradicionales, los productos se colocan al final de las máquinas de moldeo por inyección. Tiene doble brazo. El brazo vertical es una platina telescópica y la carrera vertical es de 1300 mm. Servoaccionamiento AC de cinco ejes. Después de la instalación, el espacio de instalación del eyector se puede ahorrar entre un 30% y un 40% y la planta se puede utilizar más plenamente, lo que permite una mejor utilización del espacio de producción, la productividad aumentará entre un 20% y un 30%, se reducirá la tasa de defectos y se garantizará la seguridad de los operadores, reducir la mano de obra y controlar con precisión la producción para reducir el desperdicio. Sistema integrado de controlador y controlador de cinco ejes: menos líneas de señal, comunicación a larga distancia, buen rendimiento de expansión, fuerte capacidad antiinterferencia, alta precisión de posicionamiento repetido, puede controlar simultáneamente múltiples ejes, mantenimiento simple del equipo y baja tasa de fallas.

Posicionamiento preciso

Rápido

Larga vida útil

Baja tasa de fracaso

Reducir la mano de obra

Telecomunicación
| Fuente de energía (kVA) | IMM recomendado (toneladas) | Travesía impulsada | Modelo de EOAT |
| 3.40 | 320T-700T | Servomotor de CA | dos succiones dos fijaciones |
| Carrera transversal (mm) | Carrera transversal (mm) | Carrera vertical (mm) | Carga máxima (kg) |
| Arco horizontal con una longitud total inferior a 6 metros | pendiente | 1300 | 8 |
| Tiempo de salida en seco (seg) | Tiempo del ciclo de secado (seg) | Consumo de aire (NI/ciclo) | Peso (kg) |
| 2.3 | pendiente | 9 | No estándar |
Representación del modelo: W: tipo telescópico. D: Brazo del producto + brazo del corredor. S5: Cinco ejes impulsados por un servomotor de CA (eje transversal, eje vertical + eje transversal).
El tiempo de ciclo mencionado anteriormente son los resultados del estándar de prueba interno de nuestra empresa. En el proceso de aplicación real de la máquina, variarán según la operación real.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | pendiente | pendiente | pendiente | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | pendiente | pendiente | 253,5 | 399 | pendiente | 549 | pendiente |
| Q | |||||||
| 1300 | |||||||
No habrá más aviso si las especificaciones y la apariencia cambian debido a mejoras u otras razones. Gracias por su comprensión.

1. Cambio de estado
El colgante de aprendizaje del brazo manipulador de moldeo por inyección de plástico tiene tres estados: Manual, Detener y Automático. [Manual]: Para ingresar al modo Manual, mueva el interruptor de estado hacia la izquierda. [Detener]: Para ingresar al estado Detener, mueva el interruptor de estado hacia el centro. En esta etapa se pueden establecer parámetros. [Auto]: Para ingresar al estado Auto, mueva el interruptor de estado al centro. En esta condición se pueden realizar ajustes automáticos y correspondientes.
2. Botones de función
Botón [Inicio]:
Función 1: En el modo Automático, presione "Iniciar" para iniciar el manipulador automáticamente.
Función 2: En el estado Detener, presione "Origen" y luego "Iniciar" para restaurar el manipulador al origen.
Función 3: En el estado Detener, presione "HP" y luego "Iniciar" para restablecer el origen del manipulador.
Botón [Detener]:
Función 1: En modo Automático, presione "Detener" y la aplicación se detendrá cuando el módulo haya finalizado. Función 2: Cuando ocurre una alerta, toque "Detener" en el modo Automático para borrar la visualización de la alarma resuelta.
Botón [Origen]: Sólo es aplicable a acciones de referencia. Consulte la Sección 2.2.4 "Método de inicio".
Botón [HP]: Presione "HP" y luego "Iniciar", todos los ejes se restablecerán en el orden de Y1, Y2 Z, X1 y X2, Y1 e Y2 volverán a 0, y Z, X1 y X2 volverán al inicio. posición del programa.
Botón [Arriba/Abajo velocidad]: Estos dos botones se pueden usar para ajustar la velocidad global en estado Manual y Automático.
Botón [Parada de emergencia]: En caso de emergencia, al presionar el botón "Parada de emergencia" se apagarán todos los ejes y sonará la alerta de "Parada de emergencia". Después de quitar la perilla, presione la tecla "Detener" para silenciar la alarma.

-

Moldeo por inyección
Categorías de productos
-
Servomanipulador de cinco ejes de alta precisión BRTV0...
-

Robot de inyección de moldeo industrial lineal BRTR0...
-

Manipulador de alta velocidad para inyección de moldes BRTR0...
-

Manipulador industrial lineal servo AC BRTR09WD...
-

Manipulador de inyección servo de CA de cinco ejes BRTR13...
-

Manipulador de robot cartesiano de velocidad rápida BRTR17WD...
Integradores BORUNTE y BORUNTE
En el ecosistema BORUNTE, BORUNTE es responsable de la I+D, la producción y la venta de robots y manipuladores. Los integradores de BORUNTE utilizan sus ventajas industriales o de campo para proporcionar diseño, integración y servicio posventa de aplicaciones terminales para los productos BORUNTE que venden. BORUNTE y los integradores de BORUNTE cumplen con sus respectivas responsabilidades y son independientes entre sí, trabajando juntos para promover el brillante futuro de BORUNTE.
- Teléfono:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Provincia de Guangdong, China
- borunterobotcoltd@gmail.com



Ventosas de esponja, sistema visual 2D, Compensador de posición de fuerza axial, Husillo neumático flotante neumático., Husillo eléctrico flotante neumático, Divisor no magnético,
-

realidad virtual
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba