
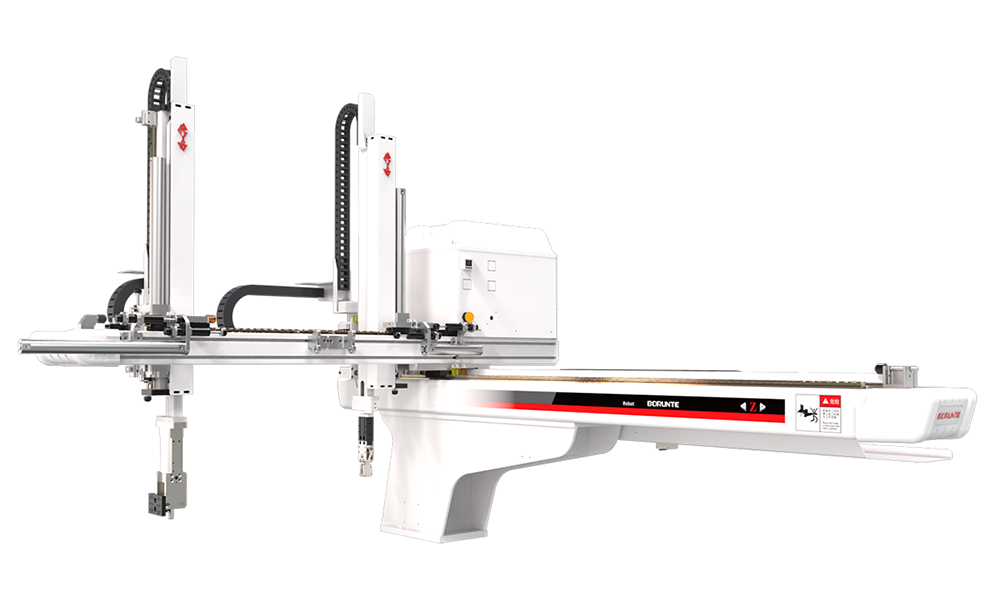



El brazo robótico transversal BRTB06WDS1P0/F0 se aplica a todo tipo de máquinas de inyección horizontales de 120T-250T para productos para llevar y bebederos. Sistema de control integrado de control de accionamiento de un solo eje: menos líneas de señal, comunicación a larga distancia, buen rendimiento de expansión, gran capacidad antiinterferencia, alta precisión de posicionamiento repetido, puede controlar múltiples ejes al mismo tiempo, mantenimiento simple del equipo y menos fallas tasa.

Posicionamiento preciso

Rápido

Larga vida útil

Baja tasa de fracaso

Reducir la mano de obra

Telecomunicación
| Fuente de energía (KVA) | IMM recomendado (toneladas) | Travesía impulsada | Modelo de EOAT |
| 1,69 | 120T-250T | Servomotor de CA | Una succión un accesorio |
| Carrera transversal (mm) | Carrera transversal (mm) | Carrera vertical (mm) | Carga máxima (kg) |
| 1250 | P:300-R:125 | 800 | 3 |
| Tiempo de salida en seco (seg) | Tiempo del ciclo de secado (seg) | Consumo de aire (NI/ciclo) | Peso (kg) |
| 1.7 | 6.49 | 3.5 | 198 |
Representación del modelo: W: Tipo telescópico. D: Brazo del producto + brazo del corredor. S5: Cinco ejes impulsados por un servomotor de CA (eje transversal, eje vertical + eje transversal).
El tiempo de ciclo mencionado anteriormente son los resultados del estándar de prueba interno de nuestra empresa. En el proceso de aplicación real de la máquina, variarán según la operación real.

| A | B | C | D | E | F | G | H |
| 1340 | 2044 | 800 | 388 | 1250 | 354 | 165 | 210 |
| I | J | K | L | M | N | O | |
| 135 | 475 | 520 | 1190 | 225 | 520 | 1033 |
No habrá más aviso si las especificaciones y la apariencia cambian debido a mejoras u otras razones. Gracias por su comprensión.

Instalación del sistema servomanipulador de un eje BRTB08WDS1P0F0
1) El cableado debe ser realizado por un electricista profesional.
2) Asegúrese de que la alimentación esté desconectada antes de iniciar la operación.
3) Instálelo sobre materiales ignífugos como metal y manténgalo alejado de materiales combustibles.
4) Debe estar conectado a tierra de forma segura cuando se utilice.
5) Si la fuente de alimentación externa es anormal, el sistema de control fallará. Para que todo el sistema funcione de forma segura, asegúrese de configurar el circuito de seguridad fuera del sistema de control. Manipulador multieje de moldeo por inyección BORUNTE Sistema de control de moldeo por inyección Multieje 269.
6) Antes de la instalación, cableado, operación y mantenimiento, el operador debe estar familiarizado con el contenido de este manual. También es necesario comprender plenamente los conocimientos mecánicos y electrónicos pertinentes y todas las precauciones de seguridad relacionadas.
7) La caja de control eléctrico para la instalación del controlador debe estar bien ventilada y ser resistente al aceite y al polvo. Si la caja de control eléctrico es hermética, es probable que la temperatura del controlador sea demasiado alta, lo que afectará el funcionamiento normal. Por lo tanto, se debe instalar un extractor de aire. La temperatura adecuada en la caja de control eléctrico es inferior a 50°C. No lo utilice en lugares con condensación y congelación.
8) El controlador no debe instalarse demasiado cerca del contactor, transformador y otros accesorios de CA para evitar sobretensiones innecesarias. Precaución: una manipulación inadecuada puede provocar riesgos, incluidas lesiones personales o accidentes mecánicos.

-
moldeo por inyección




Integradores BORUNTE y BORUNTE
En el ecosistema BORUNTE, BORUNTE es responsable de la I+D, la producción y la venta de robots y manipuladores. Los integradores de BORUNTE utilizan sus ventajas industriales o de campo para proporcionar diseño, integración y servicio posventa de aplicaciones terminales para los productos BORUNTE que venden. BORUNTE y los integradores de BORUNTE cumplen con sus respectivas responsabilidades y son independientes entre sí, trabajando juntos para promover el brillante futuro de BORUNTE.
- Teléfono:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Provincia de Guangdong, China
- borunterobotcoltd@gmail.com



Divisor no magnético, Husillo eléctrico flotante neumático, sistema visual 2D, Husillo neumático flotante neumático., Ventosas de esponja, Compensador de posición de fuerza axial,
-

realidad virtual
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba