




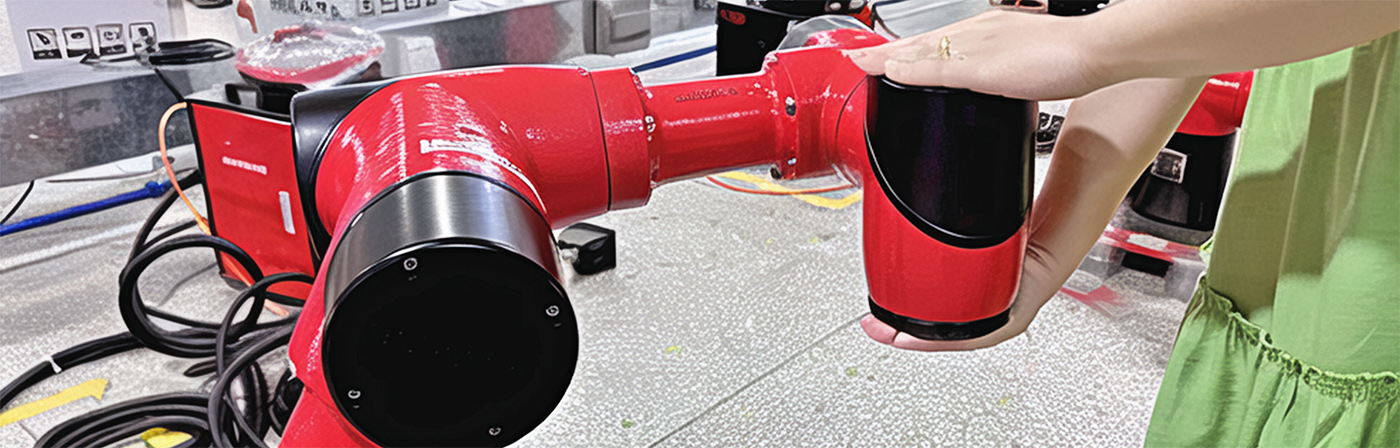
BRTIRXZ0805A es un robot cooperativo de seis ejes con función de enseñanza de arrastre desarrollado independientemente por BORUNTE. con una carga máxima de 5kg y una longitud máxima de brazo de 930mm. Tiene las funciones de detección de colisiones y reproducción de seguimiento. Es seguro y eficiente, inteligente y fácil de usar, flexible y liviano, económico y confiable, de bajo consumo de energía y otras características, que satisfacen en gran medida las necesidades de la cooperación hombre-máquina. Su alta sensibilidad y rápida respuesta se pueden aplicar a líneas de producción flexibles de alta densidad, para satisfacer las necesidades de embalaje de productos, moldeo por inyección, carga y descarga, ensamblaje y otras operaciones, especialmente para la demanda de aplicaciones de trabajo colaborativo hombre-máquina. El grado de protección alcanza IP50. A prueba de polvo y agua. La precisión del posicionamiento repetido es de ±0,1 mm.

Posicionamiento preciso

Rápido

Larga vida útil

Baja tasa de fracaso

Reducir la mano de obra

Telecomunicación
| Artículo | Rango | velocidad máxima | ||
| Brazo | J1 | ±180° | 180°/s | |
| J2 | ±90° | 180°/s | ||
| J3 | -70°~+240° | 180°/s | ||
| Muñeca | J4 | ±180° | 180°/s | |
| J5 | ±180° | 180°/s | ||
| J6 | ±360° | 180°/s | ||
|
| ||||
| Longitud del brazo (mm) | Capacidad de carga (kg) | Precisión de posicionamiento repetido (mm) | Fuente de energía (kVA) | Peso (kg) |
| 930 | 5 | ±0,05 | 0,76 | 28 |

Características de BRTIRXZ0805A
1. La colaboración entre humanos y máquinas es más segura: el sensor de torsión integrado de alta confiabilidad con función de detección de colisiones puede garantizar de manera eficiente la seguridad de la colaboración entre humanos y máquinas, sin la necesidad de aislar la cerca, lo que ahorra mucho espacio.
2.Fácil control y enseñanza de arrastre: la programación se puede lograr arrastrando la trayectoria o utilizando una grabación visual sensible en 3D de la trayectoria del objetivo, que es simple y fácil de usar;
3.Estructura liviana, portátil y simple: Diseñado con una estructura liviana, todo el robot pesa menos de 35 KG y está equipado con un módulo altamente integrado, lo que simplifica enormemente la estructura interna del cuerpo y facilita el desmontaje y montaje.
4.Económicamente y eficiente: hermoso diseño de robot y bajo costo. Tiene baja inversión inicial, alta rentabilidad, movimientos flexibles y suaves y una velocidad máxima de 2,0 m/s.
5.Características de seguridad: Estos robots suelen integrar funciones de seguridad avanzadas, como detección de colisiones y monitoreo de fuerza, lo que garantiza un funcionamiento seguro en estrecha proximidad con trabajadores humanos. Esto los hace adecuados para aplicaciones de robots colaborativos (cobots), donde humanos y robots trabajan juntos.
Condiciones de trabajo de BRTIRXZ0805A
1. Fuente de alimentación: Gabinete de control CA: 220 V ± 10 % 50 HZ/60 HZ, cuerpo CC: 48 V ± 10 %
2. Temperatura de funcionamiento: 0 ℃ -45 ℃; Temperatura de batido: 15 ℃ -25 ℃
3. Humedad relativa: 20-80% RH (sin condensación)
4 、 Ruido: ≤75 dB (A)



-
Colaboración hombre-máquina
-

moldeo por inyección
-

transporte
-
ensamblando
Categorías de productos





Integradores BORUNTE y BORUNTE
En el ecosistema BORUNTE, BORUNTE es responsable de la I+D, la producción y la venta de robots y manipuladores. Los integradores de BORUNTE utilizan sus ventajas industriales o de campo para proporcionar diseño, integración y servicio posventa de aplicaciones terminales para los productos BORUNTE que venden. BORUNTE y los integradores de BORUNTE cumplen con sus respectivas responsabilidades y son independientes entre sí, trabajando juntos para promover el brillante futuro de BORUNTE.
- Teléfono:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Provincia de Guangdong, China
- borunterobotcoltd@gmail.com



Husillo neumático flotante neumático., sistema visual 2D, Divisor no magnético, Ventosas de esponja, Compensador de posición de fuerza axial, Husillo eléctrico flotante neumático,
-

realidad virtual
-

correo electrónico
-

Teléfono
-

Whatsapp
-

Arriba