
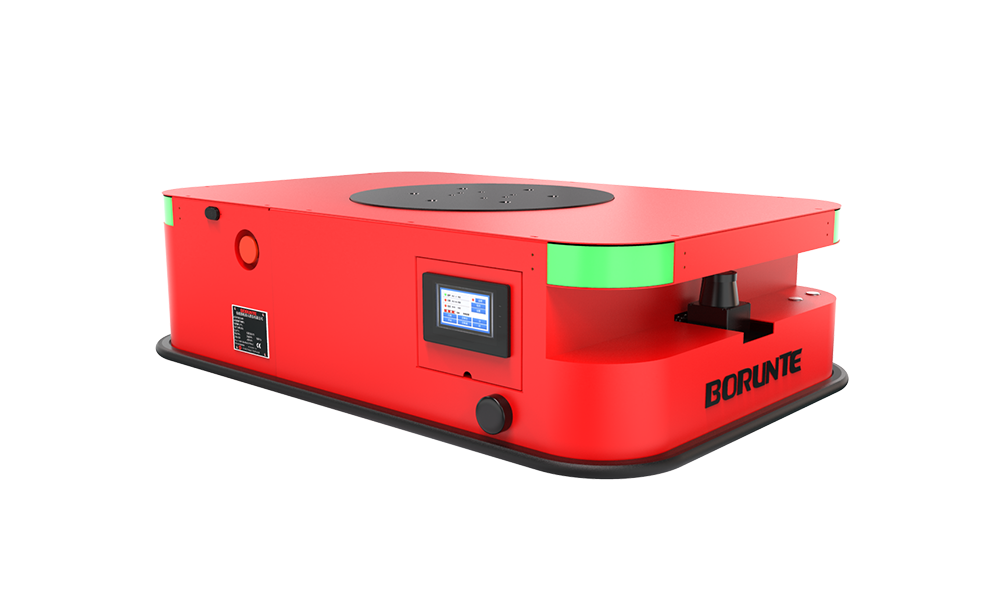



BRTAGV12010A estas kaŝa transporta roboto uzante laseron SLAM kun QR-koda navigado, kun ŝarĝo de 100kg. Laser SLAM kaj QR-koda navigado povas esti ŝanĝita libere por renkonti plurajn scenojn kaj malsamajn precizecpostulojn. En kompleksaj scenoj kun multaj bretoj, la QR-kodo estas uzata por preciza poziciigado, borado en la bretojn por pakado kaj manipulado. Laser SLAM-navigado estas uzata en fiksaj scenoj, kiu ne estas limigita de la grunda QR-kodo kaj povas funkcii libere.

Preciza Pozicio

Rapide

Longa Servovivo

Malalta Malsukcesa Procento

Redukti Laboron

Telekomunikado
| Navigada reĝimo | Laser SLAM & QR-navigado |
| Stirita reĝimo | Du-rada diferencialo |
| L*W*H | 996mm*646mm*269mm |
| Turnradiuso | 550mm |
| Pezo | Ĉirkaŭ 130 kg |
| Ratrd ŝarĝo | 100 kg |
| Grunda senigo | 32mm |
| Jacking plato grandeco | R=200mm |
| Maksimuma jakalteco | 60mm |
| Elfaraj Parametroj | |
| Trafikebleco | ≤3% Deklivo |
| Kinematika precizeco | ±10 mm |
| Kroza Rapido | 1 m/s (≤1.2m/s) |
| Bateria Parametroj | |
| Bateria kapablo | 24A·H |
| Kontinua kurada tempo | ≥8H |
| Ŝarga metodo | Manlibro, Aŭtomata |
| Specifaj Ekipaĵoj | |
| Lasera radaro | ✓ |
|
|
|
| Butono de krizhalto | ✓ |
| Parolanto | ✓ |
| Atmosfera lampo | ✓ |
| Kontraŭ-kolizio strio | ✓ |

Ses trajtoj de BRTAGV12010A:
1. Aŭtonoma: Altnivela aŭtomata gvidroboto estas ekipita per sensiloj kaj navigaciaj sistemoj, kiuj permesas al ĝi funkcii sendepende de rekta homa kontrolo.
2. Fleksebleco: AGV povas facile navigi normalajn vojojn kaj ankaŭ ŝanĝi al aliaj vojoj laŭbezone.
3. Efikeco: AGV povas tranĉi transportkostojn dum ankaŭ plibonigas liveran precizecon.
4. Sekureco: AGV estas ekipitaj per sekurecaj protektaj aparatoj por malhelpi koliziojn kaj protekti la sekurecon de homoj kaj aliaj maŝinoj.
5. Konsistenco: AGV povas esti trejnita por plenumi specifajn devojn konstante.
6. Baterio-funkciigita: AGV uzas reŝargeblan baterioteknologion, permesante al ili labori dum pli longaj tempodaŭroj ol konvenciaj maŝinoj.
Ekipaĵprizorgado DE Altnivela aŭtomata gvidroboto:
1. La ŝelo kaj universala rado de la progresinta aŭtomatigita gvidroboto devas esti inspektitaj unufoje monate, kaj la lasero devus esti kontrolita unufoje semajne. Ĉiujn tri monatojn, la sekurecaj etikedoj kaj butonoj devas pasigi teston.
2. Ĉar la veturrado kaj universala rado de la roboto estas poliuretano, ili lasos spurojn sur la tero post etendita uzo, necesigante rutinan purigadon.
3. La robotkorpo devas suferi rutinan purigadon.
4. Regula lasera purigado estas necesa. La roboto povas esti nekapabla rekoni signojn aŭ paletajn bretojn se la lasero ne estas konvene konservita; ĝi ankaŭ povas atingi krizhaltŝtaton sen ŝajna klarigo.
5. AGV kiuj estis senservoj dum plilongigita tempodaŭro devas esti stokitaj kun kontraŭ-korodaj mezuroj, malŝaltitaj, kaj la kuirilaro replenigita unufoje monate.
6. La diferenciga ilaro planeda reduktilo devas esti ekzamenita por prizorgado de oleo-injekto ĉiujn ses monatojn.
7. Por pliaj informoj pri ekipaĵo prizorgado, konsultu la uzantgvidilon.



-

Stokeja ordigo
-
Ŝargado kaj malŝarĝo
-
Aŭtomata uzado




BORUNTE kaj BORUNTE integristoj
En la BORUNTE-ekosistemo, BORUNTE respondecas pri la R&D, produktado kaj vendo de robotoj kaj manipulantoj. BORUNTE-integrigantoj utiligas siajn industriajn aŭ kampajn avantaĝojn por disponigi terminalan aplikaĵdezajnon, integriĝon kaj postvendan servon por la BORUNTE-produktoj kiujn ili vendas. La integristoj de BORUNTE kaj BORUNTE plenumas siajn respektivajn respondecojn kaj estas sendependaj unu de la alia, kunlaborante por antaŭenigi la brilan estontecon de BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Ĉinio
- borunterobotcoltd@gmail.com



Spongaj suĉtasoj, Pneŭmatika ŝveba elektra spindelo, 2D vida sistemo, Pneŭmatika ŝveba pneŭmatika ŝpinilo, Aksa forto pozicio kompensilo, Nemagneta disigilo,
-

vr
-

retpoŝto
-

Telefono
-

Whatsapp
-

Supre