



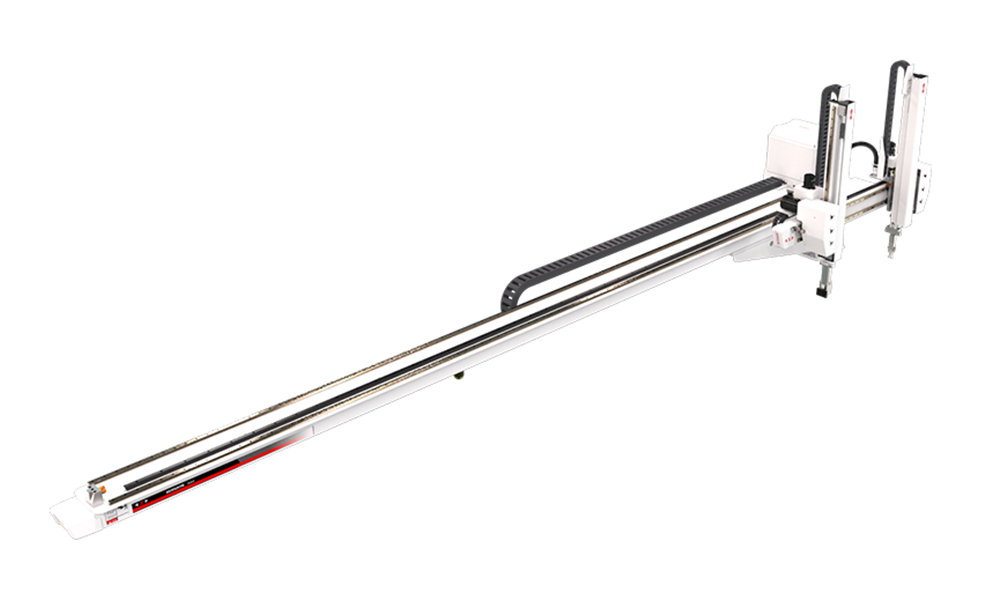
Die BRTV13WDS5P0/F0-Serie gilt für alle Arten von horizontalen Spritzgießmaschinen der Baureihen 320T-700T für herausnehmbare Produkte und Anguss. Die Installation unterscheidet sich von herkömmlichen Balkenrobotern. Die Produkte werden am Ende der Spritzgießmaschinen platziert. Es hat einen Doppelarm. Der Vertikalarm ist ein Teleskoptisch und der Vertikalhub beträgt 1300 mm. Fünfachsiger AC-Servoantrieb. Nach der Installation kann der Installationsraum des Ejektors um 30–40 % eingespart werden, und die Anlage kann vollständiger genutzt werden, was eine bessere Ausnutzung des Produktionsraums ermöglicht, die Produktivität wird um 20–30 % gesteigert, die Fehlerquote reduziert, sichergestellt Sicherheit der Bediener, Reduzierung des Personalaufwands und genaue Steuerung der Leistung, um Abfall zu reduzieren. Integriertes Fünf-Achsen-Treiber- und Controller-System: weniger Signalleitungen, Fernkommunikation, gute Erweiterungsleistung, starke Entstörungsfähigkeit, hohe Genauigkeit der wiederholten Positionierung, gleichzeitige Steuerung mehrerer Achsen, einfache Gerätewartung und niedrige Ausfallrate.

Genaue Positionierung

Schnell

Lange Lebensdauer

Niedrige Ausfallrate

Reduzieren Sie die Arbeit

Telekommunikation
| Stromquelle (kVA) | Empfohlenes IMM (Tonnen) | Traverse angetrieben | Modell von EOAT |
| 3.40 | 320T-700T | AC-Servomotor | zwei Absaugungen, zwei Vorrichtungen |
| Querhub (mm) | Querhub (mm) | Vertikaler Hub (mm) | Max. Belastung (kg) |
| Horizontaler Bogen mit einer Gesamtlänge von weniger als 6 Metern | ausstehend | 1300 | 8 |
| Trockenzeit zum Herausnehmen (Sek.) | Trockenzykluszeit (Sek.) | Luftverbrauch (NI/Zyklus) | Gewicht (kg) |
| 2.3 | ausstehend | 9 | Nicht standardmäßig |
Modelldarstellung: W: Teleskoptyp. D: Produktarm + Läuferarm. S5: Fünf Achsen, angetrieben durch einen AC-Servomotor (Querachse, Vertikalachse + Querachse).
Die oben genannten Zykluszeiten sind das Ergebnis unserer firmeninternen Prüfnorm. Im tatsächlichen Anwendungsprozess der Maschine variieren sie je nach tatsächlichem Betrieb.

| A | B | C | D | E | F | G | O |
| 1614 | ≤6m | 162 | ausstehend | ausstehend | ausstehend | 167,5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | ausstehend | ausstehend | 253,5 | 399 | ausstehend | 549 | ausstehend |
| Q | |||||||
| 1300 | |||||||
Keine weitere Mitteilung, wenn die Spezifikation und das Erscheinungsbild aus Verbesserungsgründen oder aus anderen Gründen geändert werden. Vielen Dank für Ihr Verständnis.

1. Zustandsschalter
Das Programmierhandgerät des Kunststoffspritzguss-Manipulatorarms hat drei Status: Manuell, Stopp und Auto. [Manuell]: Um in den manuellen Modus zu gelangen, bewegen Sie den Statusschalter nach links. [Stopp]: Um in den Stop-Zustand zu gelangen, bewegen Sie den Statusschalter in die Mitte. In dieser Phase können Parameter eingestellt werden. [Auto]: Um in den Auto-Status zu wechseln, bewegen Sie den Statusschalter in die Mitte. In diesem Zustand können automatische und entsprechende Einstellungen vorgenommen werden.
2. Funktionstasten
Schaltfläche [Start]:
Funktion 1: Drücken Sie im Auto-Modus „Start“, um den Manipulator automatisch zu starten.
Funktion 2: Drücken Sie im Stoppzustand „Ursprung“ und dann „Start“, um den Manipulator auf den Ursprung zurückzusetzen.
Funktion 3: Drücken Sie im Stoppzustand „HP“ und dann „Start“, um den Ursprung des Manipulators zurückzusetzen.
Schaltfläche [Stopp]:
Funktion 1: Drücken Sie im Auto-Modus „Stopp“ und die Anwendung stoppt, wenn das Modul fertig ist. Funktion 2: Wenn ein Alarm auftritt, tippen Sie im Auto-Modus auf „Stopp“, um die Anzeige des gelösten Alarms zu löschen.
Schaltfläche [Ursprung]: Gilt nur für Referenzfahrtaktionen. Bitte beachten Sie Abschnitt 2.2.4 „Homing-Methode“.
[HP]-Taste: Drücken Sie „HP“ und dann „Start“, alle Achsen werden in der Reihenfolge Y1, Y2 Z, X1 und X2 zurückgesetzt, Y1 und Y2 kehren auf 0 zurück und Z, X1 und X2 kehren zum Start zurück Position des Programms.
Schaltfläche [Geschwindigkeit erhöhen/verringern]: Mit diesen beiden Schaltflächen kann die globale Geschwindigkeit im manuellen und automatischen Zustand angepasst werden.
[Not-Aus]-Taste: Im Notfall werden durch Drücken der „Not-Aus“-Taste alle Achsen ausgeschaltet und der „Not-Aus“-Alarm erklingt. Nachdem Sie den Knopf entfernt haben, drücken Sie die „Stopp“-Taste, um den Alarm stummzuschalten.

-

Spritzguss
Produktkategorien
-
Fünfachsiger hochpräziser Servomanipulator BRTV0...
-

Linearer industrieller Spritzgießroboter BRTR0...
-

Hochgeschwindigkeitsmanipulator für die Spritzgussform BRTR0...
-

AC-Servo-Linear-Industriemanipulator BRTR09WD...
-

Fünfachsiger AC-Servo-Einspritzmanipulator BRTR13...
-

Schneller kartesischer Robotermanipulator BRTR17WD...
BORUNTE und BORUNTE-Integratoren
Im BORUNTE-Ökosystem ist BORUNTE für die Forschung und Entwicklung, Produktion und den Vertrieb von Robotern und Manipulatoren verantwortlich. BORUNTE-Integratoren nutzen ihre Branchen- oder Feldvorteile, um Terminalanwendungsdesign, Integration und Kundendienst für die von ihnen verkauften BORUNTE-Produkte bereitzustellen. BORUNTE und BORUNTE-Integratoren erfüllen ihre jeweiligen Verantwortlichkeiten und arbeiten unabhängig voneinander zusammen, um die glänzende Zukunft von BORUNTE zu fördern.
- Tel.:+86-400-870-8989
- Nr. 83, Shafu Road, Dorf Shabu, Stadt Dalang, Stadt Dongguan, Provinz Guangdong, China
- borunterobotcoltd@gmail.com



Schwammsaugnäpfe, 2D-visuelles System, Axialkraft-Positionskompensator, Pneumatisch schwimmende pneumatische Spindel, Pneumatische schwimmende elektrische Spindel, Nicht magnetischer Splitter,
-

vr
-

E-Mail
-

Telefon
-

WhatsApp
-

Spitze