BRTIRPH1210A er en seks-akset robot udviklet af BORUNTE til svejse-, afgratnings- og slibeapplikationsindustrien. Den er kompakt i formen, lille i størrelsen, let i vægt, med en maksimal belastning på 10 kg og et armspænd på 1225 mm. Dens håndled vedtager en hul struktur, hvilket gør ledningerne mere bekvemme og bevægelsen mere fleksibel. Det første, andet og tredje led er alle udstyret med højpræcisionsreduktionsanordninger, og det fjerde, femte og sjette led er alle udstyret med højpræcisionsgearstrukturer. Den højhastighedsforbindelseshastighed muliggør fleksibel betjening. Beskyttelsesgraden når IP54. Støvtæt og vandtæt. Gentagelsespositioneringsnøjagtigheden er ±0,07 mm.

Nøjagtig positionering

Hurtig

Lang levetid

Lav fejlrate

Reducer arbejdskraft

Telekommunikation
| Punkt | Rækkevidde | Max hastighed | ||
| Arm | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Håndled | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Armlængde (mm) | Belastningsevne (kg) | Gentagen positioneringsnøjagtighed (mm) | Strømkilde (kVA) | Vægt (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Hvad er fordelene ved at købe professionel poleringsrobotarm? BORUNTE polerende industrirobotter kan forbedre produktionseffektiviteten, forbedre produktkvaliteten, reducere arbejdsomkostninger og risiko for menneskelige fejl, det kan arbejde i høje temperaturer, skadelig gas og andre miljøer for at give et sikrere arbejdsmiljø. 2. Hvordan vælger du en polerende industrirobot, der passer til dine behov? Når du vælger en robot, skal følgende faktorer tages i betragtning: arbejdsbyrde, arbejdsområde, krav til nøjagtighed, arbejdshastighed, sikkerhedskrav, programmerings- og driftsenkelhed, vedligeholdelseskrav og budgetbegrænsninger. Samtidig bør der også gennemføres konsultationer med leverandører og fagfolk for at få mere detaljerede forslag. Væsentlige egenskaber ved professionel poleringsrobotarm: 1. Præcision og repeterbarhed: Poleringsarbejde kræver typisk meget præcis bevægelse og ensartet drift. Industrielle robotter kan positionere og styre med millimeterniveaunøjagtighed, hvilket sikrer ensartede resultater i hver operation. 2. Automatisering og effektivitet: Et af hovedformålene med industrirobotter er at forbedre produktionseffektiviteten. Poleringsprocessen er normalt besværlig og tidskrævende, men robotter kan udføre opgaver på en hurtig og ensartet måde og derved forbedre produktionslinjens samlede effektivitet. 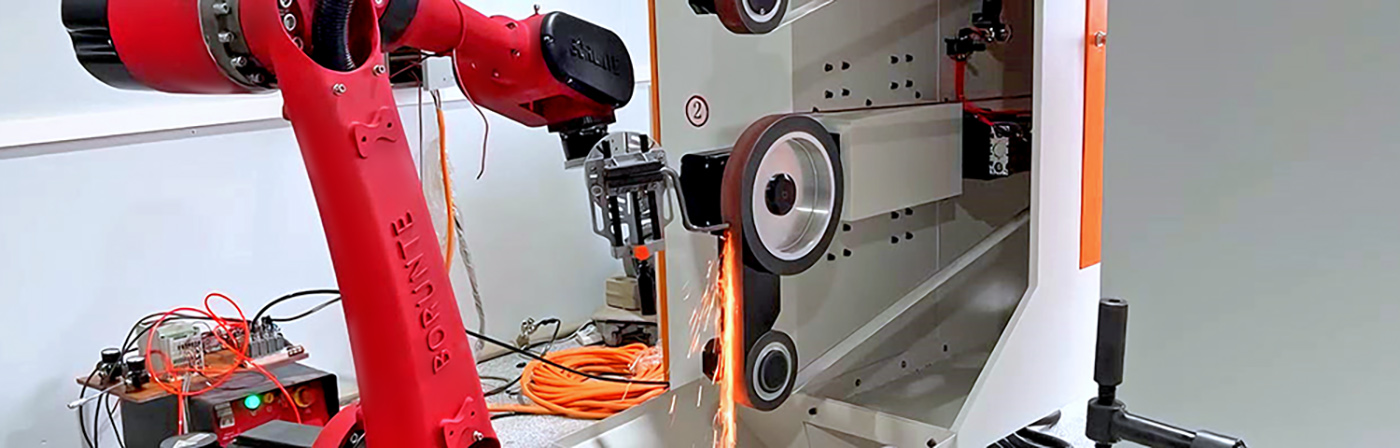   
ProduktkategorierBORUNTE og BORUNTE integratorerI BORUNTE-økosystemet er BORUNTE ansvarlig for forskning og udvikling, produktion og salg af robotter og manipulatorer. BORUNTE-integratorer udnytter deres industri- eller feltfordele til at levere terminalapplikationsdesign, integration og eftersalgsservice for de BORUNTE-produkter, de sælger. BORUNTE- og BORUNTE-integratorer opfylder deres respektive ansvar og er uafhængige af hinanden og arbejder sammen for at fremme BORUNTEs lyse fremtid.
© Copyright - 2010-2024: Alle rettigheder forbeholdes.Sitemap - AMP mobil Pneumatisk flydende pneumatisk spindel, Svampe sugekopper, Pneumatisk flydende elektrisk spindel, Aksialkraftpositionskompensator, Ikke magnetisk splitter, 2D visuelt system,
|