




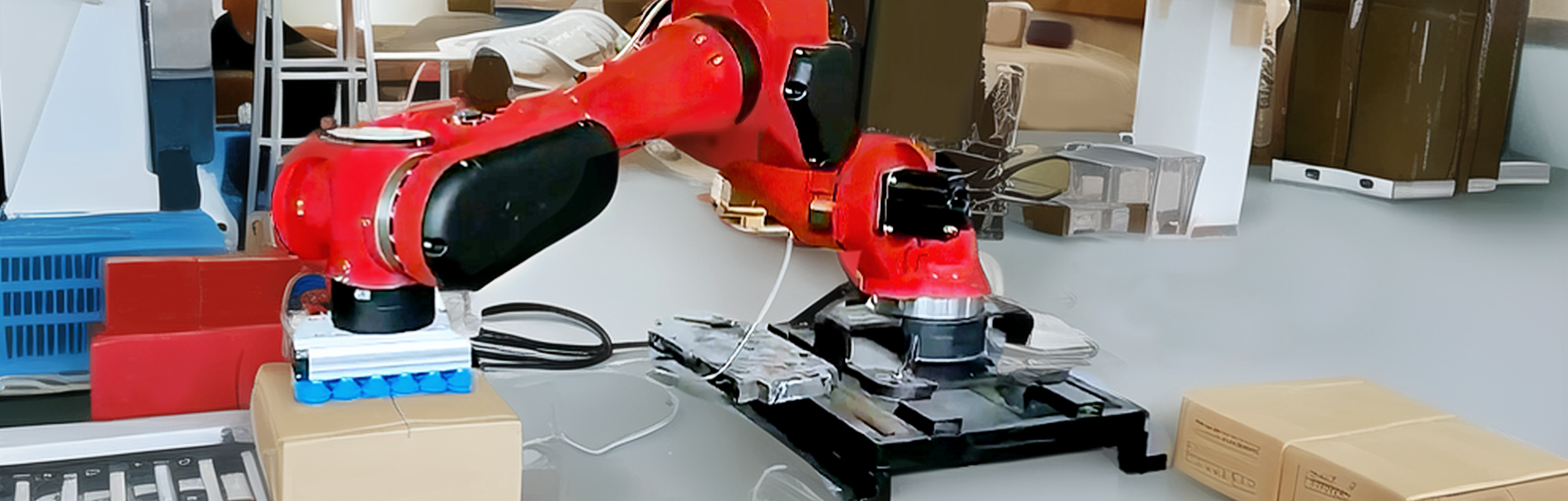
U robot di tipu BRTIRPL1608A hè un robot di quattru assi chì hà sviluppatu da BORUNTE per l'assemblea, a classificazione è altri scenarii d'applicazione di materiali ligeri, chjuchi è spargugliati. A lunghezza massima di u bracciu hè 1600mm è a carica massima hè 8KG. U gradu di prutezzione righjunghji IP40. A precisione di posizionamentu ripetitu hè di ± 0,1 mm.

Posizionamentu Precisu

Rapidu

Longa vita di serviziu

Low Failure Rate

Reduce u travagliu

Telecomunicazione
| Articulu | Gamma | Gamma | Velocità massima | ||
| Bracciu Maestru | Supra | Superficie di muntatura à distanza di corsa 1146 mm | 38° | corsa: 25/305/25 (mm) | |
| Hem | 98 ° | ||||
| Fine | J4 | ± 360 ° | (Carica ciclica / Ritmu) 0 kg / 150 time / min, 3 kg / 150 time / min, 5 kg / 130 time / min, 8 kg / 115 time / min | ||
| Lunghezza di u bracciu (mm) | Capacità di carica (kg) | Precisione di posizionamentu ripetutu (mm) | Fonte d'energia (kVA) | Pesu (kg) | |
| 1600 | 8 | ± 0,1 | 6.36 | 256 | |

BRTIRPL1608A hè u risultatu di anni di ricerca è sviluppu estensivi da a squadra di ingegneri esperti di BORUNTE. Sfruttendu a so cumpetenza in robotica è automatizazione, anu superatu diverse sfide tecniche per creà un robot chì risponde à i bisogni in continua evoluzione di l'industrii muderni. U prucessu di sviluppu hà implicatu teste rigorose, ottimisazione è sintonizazione fine per assicurà i più alti standard di prestazione, affidabilità è sicurezza.
1. Pick-and-Place:U Robot Parallelu à Quattru Assi eccelle in operazioni di pick-and-place, manighjà in modu efficiente l'uggetti di diverse dimensioni è forme. I so muvimenti precisi è a veloce veloce permettenu una classificazione rapida, impilamentu è trasferimentu di l'articuli, riducendu u travagliu manuale è aumentendu a produtividade.
2. Assemblage : Cù a so alta precisione è versatilità, stu robot hè una scelta eccellente per i travaglii di assemblea. Puderà manighjà senza difetti cumpunenti intricati, assicurendu un allineamentu precisu è cunnessione sicure. U Robot Parallelu à Quattru Assi razionalizza i prucessi di assemblea, risultatu in un cuntrollu di qualità megliu è tempu di assemblea ridutta.
3. Imballaggio: A velocità rapida di u robot è i movimenti precisi facenu ideali per l'applicazioni di imballaggio. Pò imballà rapidamente i prudutti in scatuli, casse, o cuntenituri, assicurendu un piazzamentu coherente è minimizendu l'errori di imballaggio. U Robot Parallelu à Quattru Assi ottimizeghja l'efficienza di imballaggio è sustene a produzzione di grande volume.
1. Cumu possu integrà u Robot Parallelu di Quattru Assi in a mo linea di produzzione esistente?
BORUNTE furnisce un supportu cumpletu di integrazione. A nostra squadra di esperti hà da travaglià strettamente cun voi per capisce i vostri bisogni è persunalizà l'integrazione di u robot per adattassi perfettamente à a vostra linea di produzzione. Cuntattate u nostru squadra di vendita per più assistenza.
2. Chì ghjè a capacità di carica massima di u robot ?
U Robot Parallelu à Quattru Assi hà una capacità di carica massima di 8kg, assicurendu chì pò trattà una larga gamma di oggetti è materiali in modu efficiente.
3. U robot pò esse programatu per fà travagli cumplessi ?
Assolutamente! U robot industriale di classificazione parallela automatica vene cun capacità di prugrammazione avanzata. Supporta diverse lingue di prugrammazione è offre una interfaccia user-friendly per prugrammà compiti cumplessi cun facilità. U nostru squadra di supportu tecnicu hè dispunibule per aiutà vi à programà u robot per a vostra applicazione specifica.
Applicazioni per i robot di impilatura di carica pesante:
A paletizazione, a depalletizazione, a picking di ordini è altre attività ponu esse tutte eseguite da i robot di stacking di carichi pesanti. Offrenu un metudu praticu per a gestione di carichi grossi, è ponu esse utilizati per automatizà numerosi prucessi manuali, riducendu a dumanda di travagliu umanu è aumentendu a produtividade. I robot di stacking di carica pesante sò ancu spessu usati in a produzzione di l'automobile, a trasfurmazioni di l'alimentariu è di e bevande, è a logistica è a distribuzione.


-
Trasportu
-
Sorting
-

Detezzione
-
Visione





BORUNTE è integratori BORUNTE
In l'ecosistema BORUNTE, BORUNTE hè rispunsevule per a R&D, a produzzione è a vendita di robots è manipulatori. L'integratori BORUNTE utilizanu i so vantaghji di l'industria o di u campu per furnisce u disignu di l'applicazioni di terminal, integrazione è serviziu post-vendita per i prudutti BORUNTE chì vendenu. L'integratori BORUNTE è BORUNTE cumpiendu e so rispunsabilità rispettivi è sò indipindenti l'una di l'altru, travagliendu inseme per prumove u futuru luminoso di BORUNTE.
- Tel: + 86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Compensatore di posizione di forza assiale, Mandrinu pneumaticu flottante pneumaticu, Splitter non magneticu, Sistema visuale 2D, Ventose in spugna, Mandrinu elettricu flottante pneumaticu,
-

vr
-

email
-

telefonu
-

Whatsapp
-

Top