
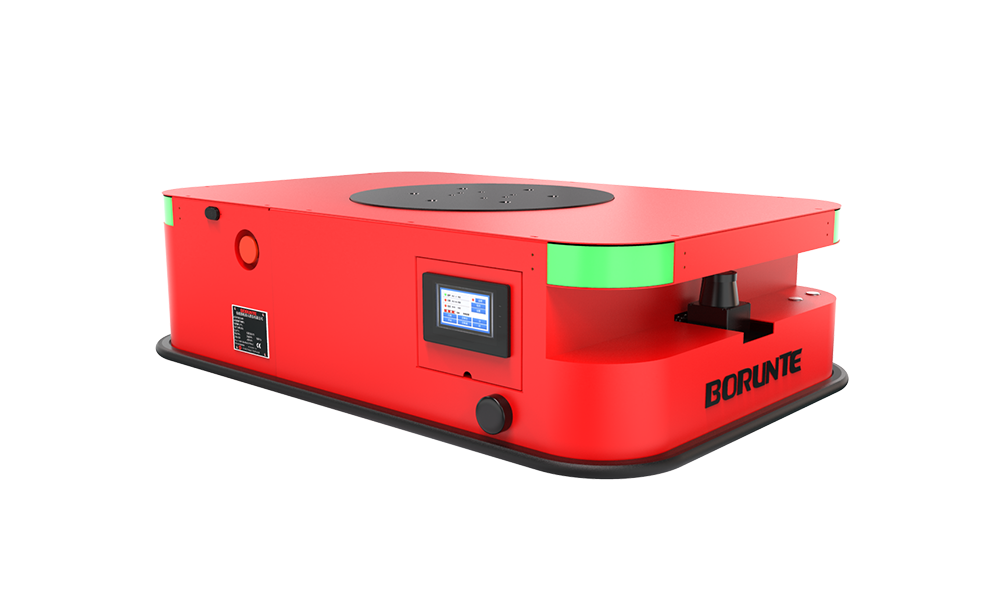



BRTAGV12010A hè un robot di trasportu jack-up chì utilizeghja laser SLAM cù navigazione di codice QR, cù una carica di 100kg. Laser SLAM è a navigazione di codice QR pò esse cambiatu liberamente per risponde à parechje scene è diverse esigenze di precisione. In sceni cumplessi cù parechje scaffali, u codice QR hè utilizatu per un posizionamentu precisu, drilling in i scaffali per imballare è manighjà. A navigazione Laser SLAM hè aduprata in sceni fissi, chì ùn hè micca limitatu da u codice QR in terra è pò operà liberamente.

Posizionamentu Precisu

Rapidu

Longa vita di serviziu

Low Failure Rate

Reduce u travagliu

Telecomunicazione
| Modu di navigazione | Navigazione laser SLAM è QR |
| Modu guidatu | Differential à dui roti |
| L * W * H | 996 mm * 646 mm * 269 mm |
| U raghju di turnu | 550 mm |
| Pesu | Circa 130 kg |
| Ratrd carica | 100 kg |
| Limpieza da terra | 32 mm |
| Dimensione di a piastra di Jacking | R = 200 mm |
| Altezza massima di cric | 60 mm |
| Parametri di rendiment | |
| Trafficità | ≤3% Pendenza |
| Accuratezza cinematica | ± 10 mm |
| Velocità di crociera | 1 m/s (≤1,2 m/s) |
| Parametri di batterie | |
| Capacità di batterie | 24A·H |
| U tempu di corsa cuntinuu | ≥8H |
| Metudu di carica | Manuale, Auto |
| Equipamenti specifichi | |
| radar laser | ✓ |
|
|
|
| Pulsante di stop d'emergenza | ✓ |
| Speaker | ✓ |
| Lampada d'atmosfera | ✓ |
| Striscia anti-collisione | ✓ |

Sei caratteristiche di BRTAGV12010A:
1. Autònuma: Un robot di guida autumàticu avanzatu hè equipatu cù sensori è sistemi di navigazione chì permettenu di funziunà indipindentamente di u cuntrollu umanu direttu.
2. Flessibilità: AGV pò facilmente navigà in e strade normali è cambià à altre strade in quantu necessariu.
3. Efficiency: AGV pò tagliate i costi di trasportu mentre ancu migliurà a precisione di consegna.
4. Sicurezza: AGV sò equipati cù dispusitivi di prutezzione di salvezza per prevene i collisioni è salvaguardà a sicurità di l'omu è di l'altri machini.
5. Cuerenza: AGV pò esse furmatu per fà e funzioni specificate in modu coerente.
6. Battery-powered: AGV aduprà a tecnulugia batterie rechargeable, chì li permette di travaglià per periodi di tempu più longu cà i machini cunvinziunali.
Manutenzione di l'equipaggiu di robot di guida automatica avanzata:
1. A cunchiglia è a rota universale di u robot di guida autumàticu avanzatu deve esse inspeccionatu una volta à u mese, è u laser deve esse verificatu una volta à settimana. Ogni trè mesi, l'etichette di sicurezza è i buttoni devenu passà una prova.
2. Perchè a rota di guida di u robot è a rota universale sò poliuretani, lasciaranu tracce in terra dopu l'usu estensu, chì necessitanu una pulizia di rutina.
3. U corpu di u robot deve esse sottumessi a pulizia di rutina.
4. Regular pulizia laser hè necessariu. U robot pò esse incapace di ricunnosce i segni o scaffali pallet se u laser ùn hè micca bè mantinutu; pò ancu ghjunghje à un statu di arrestu di emergenza senza spiegazione apparente.
5. AGV chì sò stati fora di serviziu per un periudu di tempu allargatu deve esse guardatu cù misure anti-corrosion, spenti, è a bateria ricaricata una volta à mese.
6. U riduttore planetariu di ingranaggi differenziali deve esse esaminatu per u mantenimentu di l'iniezione d'oliu ogni sei mesi.
7. Per più infurmazione nantu à u mantenimentu di l'equipaggiu, cunsultate a guida d'utilizatore.



-

Classificazione di u magazzinu
-
Carica è scarica
-
Trattamentu automaticu




BORUNTE è integratori BORUNTE
In l'ecosistema BORUNTE, BORUNTE hè rispunsevule per a R&D, a produzzione è a vendita di robots è manipulatori. L'integratori BORUNTE utilizanu i so vantaghji di l'industria o di u campu per furnisce u disignu di l'applicazioni di terminal, integrazione è serviziu post-vendita per i prudutti BORUNTE chì vendenu. L'integratori BORUNTE è BORUNTE cumpiendu e so rispunsabilità rispettivi è sò indipindenti l'una di l'altru, travagliendu inseme per prumove u futuru luminoso di BORUNTE.
- Tel: + 86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, China
- borunterobotcoltd@gmail.com



Ventose in spugna, Mandrinu elettricu flottante pneumaticu, Sistema visuale 2D, Mandrinu pneumaticu flottante pneumaticu, Compensatore di posizione di forza assiale, Splitter non magneticu,
-

vr
-

email
-

telefonu
-

Whatsapp
-

Top