
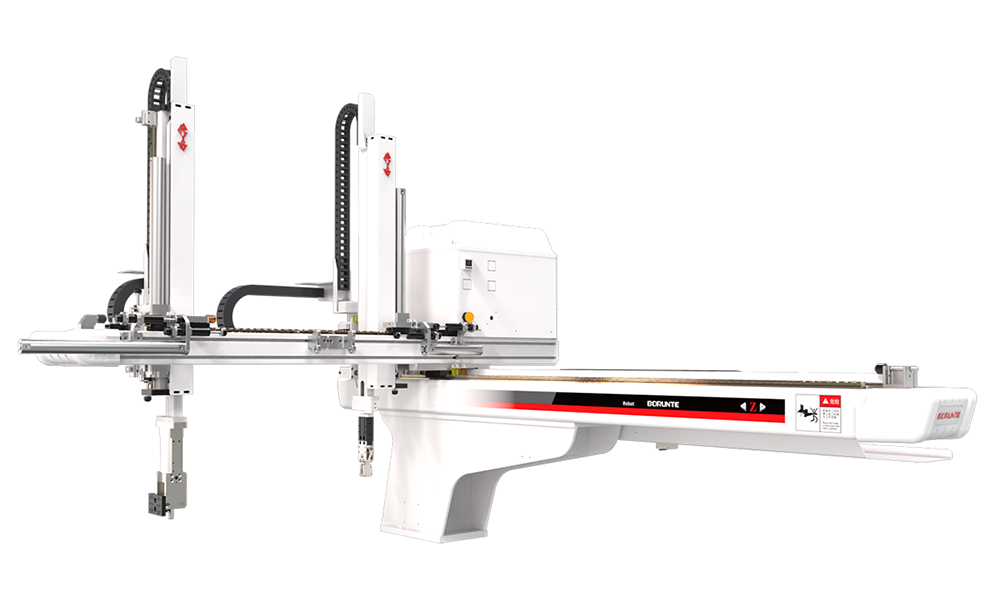



El braç del robot travessant BRTB06WDS1P0/F0 s'aplica a tots els tipus de màquines d'injecció horitzontals de 120T-250T per a productes per emportar i sprue. Sistema de control integrat de control d'un sol eix: menys línies de senyal, comunicació a llarga distància, bon rendiment d'expansió, forta capacitat anti-interferències, alta precisió de posicionament repetit, pot controlar diversos eixos al mateix temps, manteniment d'equips senzill i menys fallades taxa.

Posicionament precís

Ràpid

Llarga vida útil

Baixa taxa de fracàs

Reduir la mà d'obra

Telecomunicació
| Font d'alimentació (KVA) | IMM recomanat (tones) | Travessa impulsada | Model d'EOAT |
| 1,69 | 120T-250T | Servomotor de CA | Una aspiració, un aparell |
| Carrera transversal (mm) | Carrera transversal (mm) | Carrera vertical (mm) | Càrrega màxima (kg) |
| 1250 | P: 300-R: 125 | 800 | 3 |
| Temps de sortida en sec (s) | Temps de cicle sec (s) | Consum d'aire (NI/cicle) | Pes (kg) |
| 1.7 | 6.49 | 3.5 | 198 |
Representació del model: W: Tipus telescòpic. D: Braç de producte + braç de corredor. S5: cinc eixos accionats per un servomotor de CA (eix transversal, eix vertical + eix transversal).
El temps de cicle esmentat anteriorment són els resultats de l'estàndard de prova intern de la nostra empresa. En el procés d'aplicació real de la màquina, variaran segons el funcionament real.

| A | B | C | D | E | F | G | H |
| 1340 | 2044 | 800 | 388 | 1250 | 354 | 165 | 210 |
| I | J | K | L | M | N | O | |
| 135 | 475 | 520 | 1190 | 225 | 520 | 1033 |
No hi ha més avís si l'especificació i l'aspecte es modifiquen per una millora i altres motius. Gràcies per la vostra comprensió.

Servomanipulador d'un eix BRTB08WDS1P0F0 Instal·lació del sistema
1) Els treballs de cablejat han de ser realitzats per un electricista professional.
2) Assegureu-vos que l'alimentació estigui desconnectada abans de començar l'operació.
3) Si us plau, instal·leu-lo en materials ignífugs com el metall i manteniu-lo allunyat de materials combustibles.
4) S'ha de posar a terra de manera segura quan s'utilitza.
5) Si la font d'alimentació externa és anormal, el sistema de control fallarà. Per tal que tot el sistema funcioni de manera segura, assegureu-vos de configurar el circuit de seguretat fora del sistema de control. Manipulador multi eix d'emmotllament per injecció BORUNTE Sistema de control d'emmotllament per injecció Multi-eix 269.
6) Abans de la instal·lació, cablejat, operació i manteniment, l'operador ha d'estar familiaritzat amb el contingut d'aquest manual. També és necessari entendre completament els coneixements mecànics i electrònics rellevants i totes les precaucions de seguretat relacionades.
7) La caixa de control elèctric per a la instal·lació del controlador ha d'estar ben ventilada, a prova d'oli i a prova de pols. Si la caixa de control elèctrica és hermètica, és probable que la temperatura del controlador sigui massa alta, cosa que afectarà el treball normal. Per tant, cal instal·lar un ventilador d'escapament. La temperatura adequada a la caixa de control elèctrica és inferior a 50 °C. No l'utilitzeu en llocs amb condensació i congelació.
8) El controlador no s'ha d'instal·lar massa a prop del contactor, el transformador i altres accessoris de CA per evitar interferències de sobretensió innecessàries. Precaució: una manipulació inadequada pot provocar perills, com ara lesions personals o accidents amb màquines.

-
Emmotllament per injecció




Integradors BORUNTE i BORUNTE
A l'ecosistema BORUNTE, BORUNTE és responsable de la R+D, producció i venda de robots i manipuladors. Els integradors de BORUNTE utilitzen els seus avantatges de la indústria o de camp per oferir disseny d'aplicacions de terminal, integració i servei postvenda per als productes BORUNTE que venen. Els integradors de BORUNTE i BORUNTE compleixen les seves respectives responsabilitats i són independents els uns dels altres, treballant conjuntament per promoure el brillant futur de BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Xina
- borunterobotcoltd@gmail.com



Divisor no magnètic, Carro elèctric flotant pneumàtic, Sistema visual 2D, Eix pneumàtic flotant, Ventoses d'esponja, Compensador de posició de força axial,
-

vr
-

correu electrònic
-

Telèfon
-

Whatsapp
-

A dalt