
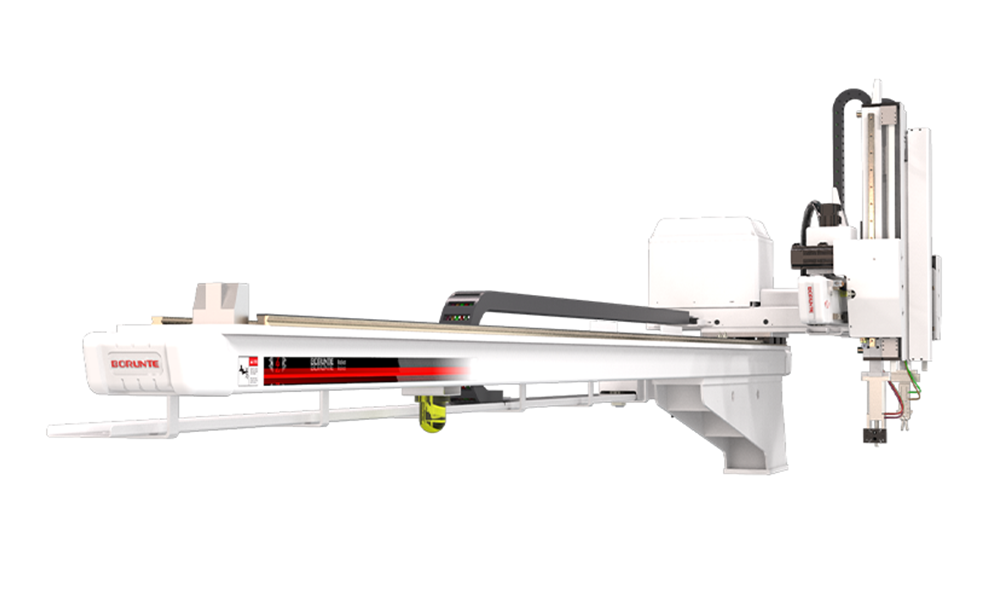


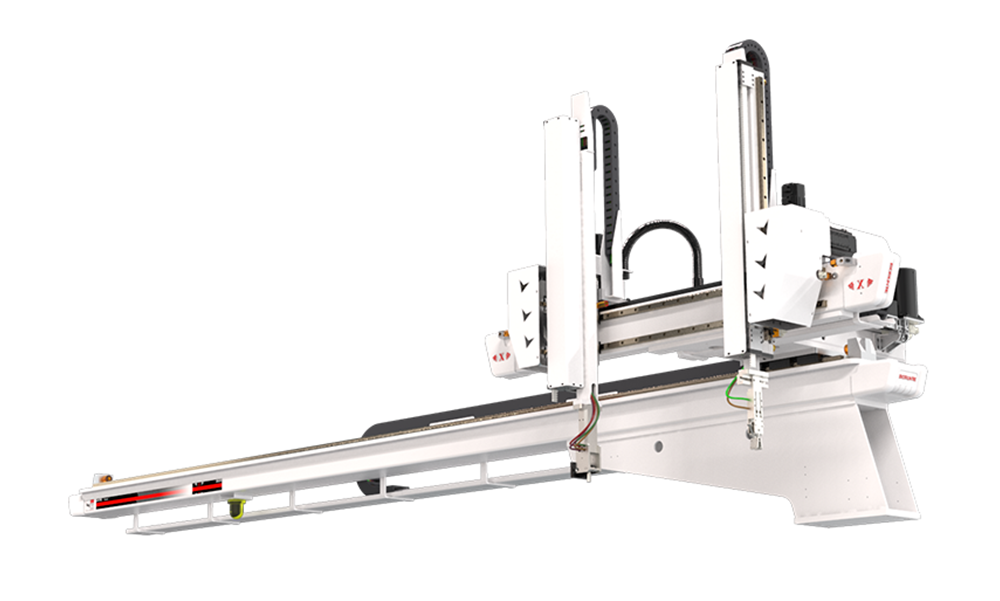
La sèrie BRTVO9WDS5P0/F0 s'aplica a tot tipus de gammes de màquines d'injecció horitzontals de 120T-320T per a productes per emportar i sprue. La instal·lació és diferent dels robots de biga tradicionals, els productes es col·loquen al final de les màquines d'emmotllament per injecció. Té un braç doble. El braç vertical és una plataforma telescòpica i la carrera vertical és de 900 mm. Servoaccionament de CA de cinc eixos. Després de la instal·lació, l'espai d'instal·lació de l'ejector es pot estalviar un 30-40%, i la planta es pot utilitzar més completament, permetent una millor utilització de l'espai de producció, la productivitat s'incrementarà en un 20-30%, reduir la taxa defectuosa, assegurar seguretat dels operadors, reduir la mà d'obra i controlar amb precisió la sortida per reduir els residus. Sistema integrat de controlador i controlador de cinc eixos: menys línies de senyal, comunicació a llarga distància, bon rendiment d'expansió, forta capacitat anti-interferències, alta precisió de posicionament repetit, pot controlar simultàniament diversos eixos, manteniment d'equips senzill i baixa taxa de fallades.

Posicionament precís

Ràpid

Llarga vida útil

Baixa taxa de fracàs

Reduir la mà d'obra

Telecomunicació
| Font d'alimentació (kVA) | IMM recomanat (tones) | Travessa impulsada | Model d'EOAT |
| 3.40 | 120T-320T | Servomotor de CA | dues aspiracions dos accessoris |
| Carrera transversal (mm) | Carrera transversal (mm) | Carrera vertical (mm) | Càrrega màxima (kg) |
| Arc horitzontal amb una longitud total inferior a 6 metres | Pendent | 900 | 5 |
| Temps de sortida en sec (s) | Temps de cicle sec (s) | Consum d'aire (NI/cicle) | Pes (kg) |
| 1.7 | pendent | 9 | No estàndard |
Representació del model: W: tipus telescòpic. D: Braç de producte + braç de corredor. S5: cinc eixos accionats per un servomotor de CA (eix transversal, eix vertical + eix transversal).
El temps de cicle esmentat anteriorment són els resultats de l'estàndard de prova intern de la nostra empresa. En el procés d'aplicació real de la màquina, variaran segons el funcionament real.

| A | B | C | D | E | F | G | O |
| 1553,5 | ≤6m | 162 | pendent | pendent | pendent | 174 | 445,5 |
| H | I | J | K | L | M | N | P |
| 187 | pendent | pendent | 255 | 555 | pendent | 549 | pendent |
| Q | |||||||
| 900 | |||||||
No hi ha més avís si l'especificació i l'aspecte es modifiquen per una millora i altres motius. Gràcies per la vostra comprensió.
Aquest producte és adequat per als productes acabats de la màquina d'emmotllament per injecció horitzontal 160T-320T i la sortida d'aigua per treure. És especialment adequat per a petits objectes d'emmotllament per injecció, com ara joguines de plàstic, raspalls de dents, caixes de sabó, impermeables, vaixella, estris, sabatilles i altres articles de plàstic diaris.
Si premeu la tecla "TIME" a la pàgina Stop o Auto, us portarà a la pàgina de modificació de l'hora.
Premeu les tecles del cursor per a cada pas de la seqüència per canviar el temps. Un cop hàgiu introduït la nova hora, premeu la tecla Enter.
El període posterior al pas d'acció s'anomena temps de retard abans de l'acció. L'acció actual es durà a terme fins que caduqui el temporitzador de retard.
Si l'interruptor de confirmació s'està utilitzant en el pas actual de la seqüència. S'indicarà el mateix període de temps per a l'acció. Si el cost real del temps d'acció supera el registre, es pot dur a terme l'acció següent fins que es verifiqui el canvi d'acció després del temps d'espera.

Comproveu regularment l'estanquitat de les femelles i els cargols:
Una de les causes principals de la fallada del manipulador és la relaxació de femelles i cargols a causa del llarg període de funcionament vigorós.
1.Premeu les femelles de muntatge de l'interruptor de límit a la part transversal, la part de dibuix i els braços frontal i lateral.
2. Comproveu l'estanquitat del terminal de posició del punt de relé a la caixa de terminals entre la part del cos mòbil i la caixa de control.
3. Fixar cada dispositiu de fre.
4. Si hi ha cargols solts que puguin causar danys a altres equips.

-

Emmotllament per injecció
Categories de productes
-

Braç manipulador d'emmotllament per injecció de plàstic BRTV...
-

Robot d'injecció d'emmotllament industrial lineal BRTR0...
-

Manipulador d'alta velocitat per injecció de motlles BRTR0...
-

Manipulador industrial lineal servo AC BRTR09WD...
-

Manipulador d'injecció servo AC de cinc eixos BRTR13...
-

Manipulador de robot cartesià de velocitat ràpida BRTR17WD...
Integradors BORUNTE i BORUNTE
A l'ecosistema BORUNTE, BORUNTE és responsable de la R+D, producció i venda de robots i manipuladors. Els integradors de BORUNTE utilitzen els seus avantatges de la indústria o de camp per oferir disseny d'aplicacions de terminal, integració i servei postvenda per als productes BORUNTE que venen. Els integradors de BORUNTE i BORUNTE compleixen les seves respectives responsabilitats i són independents els uns dels altres, treballant conjuntament per promoure el brillant futur de BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Xina
- borunterobotcoltd@gmail.com



Compensador de posició de força axial, Carro elèctric flotant pneumàtic, Sistema visual 2D, Divisor no magnètic, Ventoses d'esponja, Eix pneumàtic flotant,
-

vr
-

correu electrònic
-

Telèfon
-

Whatsapp
-

A dalt