




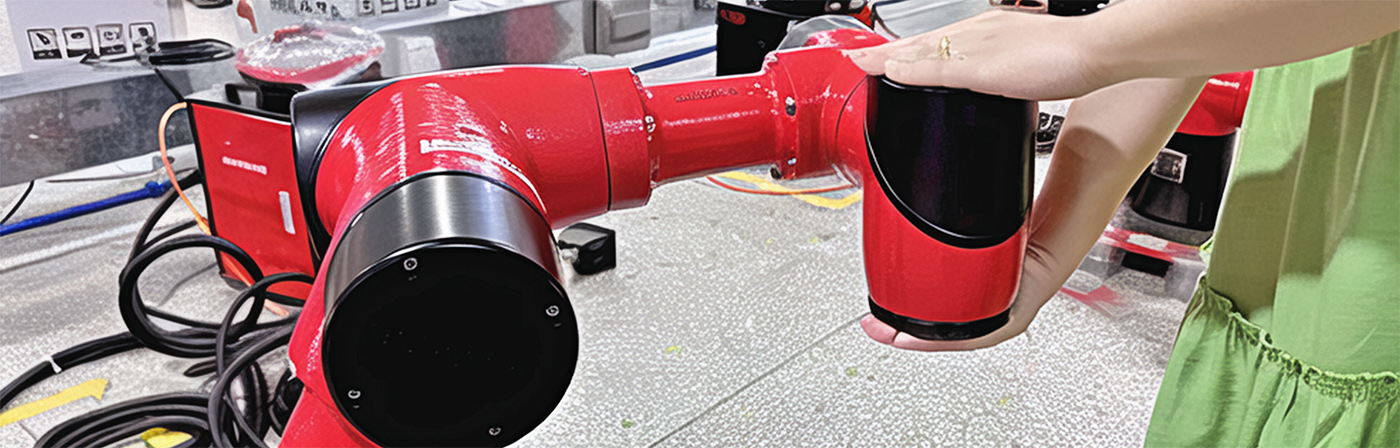
BRTIRXZ0805A és un robot cooperatiu de sis eixos amb funció d'ensenyament d'arrossegament desenvolupat de manera independent per BORUNTE. amb una càrrega màxima de 5 kg i una longitud màxima del braç de 930 mm. Té les funcions de detecció de col·lisions i reproducció de pistes. És segur i eficient, intel·ligent i fàcil d'utilitzar, flexible i lleuger, econòmic i fiable, baix consum d'energia i altres característiques, que satisfan molt les necessitats de cooperació home-màquina. La seva alta sensibilitat i resposta ràpida es poden aplicar a una línia de producció flexible d'alta densitat, per satisfer les necessitats d'embalatge de productes, emmotllament per injecció, càrrega i descàrrega, muntatge i altres operacions, especialment per a la demanda d'aplicacions de treball col·laboratiu home-màquina. El grau de protecció arriba a IP50. Resistent a la pols i a l'aigua. La precisió de posicionament repetida és de ± 0,1 mm.

Posicionament precís

Ràpid

Llarga vida útil

Baixa taxa de fracàs

Reduir la mà d'obra

Telecomunicació
| Item | Interval | Velocitat màxima | ||
| Braç | J1 | ±180° | 180°/s | |
| J2 | ±90° | 180°/s | ||
| J3 | -70°~+240° | 180°/s | ||
| Canell | J4 | ±180° | 180°/s | |
| J5 | ±180° | 180°/s | ||
| J6 | ±360° | 180°/s | ||
|
| ||||
| Longitud del braç (mm) | Capacitat de càrrega (kg) | Precisió de posicionament repetida (mm) | Font d'alimentació (kVA) | Pes (kg) |
| 930 | 5 | ±0,05 | 0,76 | 28 |

Característiques de BRTIRXZ0805A
1.La col·laboració home-màquina més segura: el sensor de parell d'alta fiabilitat integrat amb funció de detecció de col·lisions pot garantir de manera eficient la seguretat de la col·laboració home-màquina, sense necessitat d'aïllar la tanca, estalviant molt espai.
2.Fàcil control i ensenyament de l'arrossegament: la programació es pot aconseguir arrossegant la trajectòria o utilitzant un enregistrament visual sensible en 3D de la trajectòria objectiu, que és senzill i fàcil d'utilitzar;
3.Estructura lleugera, portàtil i senzilla: Dissenyat amb una estructura lleugera, tot el robot pesa menys de 35KG i està equipat amb un mòdul altament integrat, simplificant molt l'estructura interna del cos i facilitant el desmuntatge i el muntatge.
4.Econòmicament i eficient: bonic disseny de robot i baix cost. Té una inversió inicial baixa, una alta rendibilitat, moviments flexibles i suaus i una velocitat màxima de 2,0 m/s.
5.Característiques de seguretat: característiques de seguretat avançades, com ara la detecció de col·lisions i el control de la força, sovint s'integren en aquests robots, garantint un funcionament segur a prop dels treballadors humans. Això els fa adequats per a aplicacions de robots col·laboratius (cobots), on els humans i els robots treballen junts.
Condicions de treball de BRTIRXZ0805A
1, Font d'alimentació: gabinet de control CA: 220V±10% 50HZ/60HZ, cos DC: 48V±10%
2, temperatura de funcionament: 0 ℃-45 ℃; temperatura de batuda: 15 ℃-25 ℃
3, Humitat relativa: 20-80% HR (sense condensació)
4, soroll: ≤75dB (A)



-
Col·laboració humana màquina
-

Emmotllament per injecció
-

transport
-
muntatge





Integradors BORUNTE i BORUNTE
A l'ecosistema BORUNTE, BORUNTE és responsable de la R+D, producció i venda de robots i manipuladors. Els integradors de BORUNTE utilitzen els seus avantatges de la indústria o de camp per oferir disseny d'aplicacions de terminal, integració i servei postvenda per als productes BORUNTE que venen. Els integradors de BORUNTE i BORUNTE compleixen les seves respectives responsabilitats i són independents els uns dels altres, treballant conjuntament per promoure el brillant futur de BORUNTE.
- Tel:+86-400-870-8989
- NO.83, Shafu Road, Shabu Village, Dalang Town, Dongguan City, Guangdong Province, Xina
- borunterobotcoltd@gmail.com



Eix pneumàtic flotant, Sistema visual 2D, Divisor no magnètic, Ventoses d'esponja, Compensador de posició de força axial, Carro elèctric flotant pneumàtic,
-

vr
-

correu electrònic
-

Telèfon
-

Whatsapp
-

A dalt