BRTIRPH1210A je robot sa šest osa koji je razvio BORUNTE za industriju zavarivanja, uklanjanja ivica i brušenja. Kompaktnog je oblika, male veličine, male težine, sa maksimalnim opterećenjem od 10 kg i rasponom ruku od 1225 mm. Njegov zglob ima šuplju strukturu, što ožičenje čini praktičnijim, a kretanje fleksibilnijim. Prvi, drugi i treći spojevi su opremljeni visoko preciznim reduktorima, a četvrti, peti i šesti spojevi su opremljeni visoko preciznim zupčastim strukturama. Velika brzina zgloba omogućava fleksibilan rad. Stepen zaštite dostiže IP54. Otporan na prašinu i vodu. Preciznost ponavljanja pozicioniranja je ±0,07 mm.

Precizno pozicioniranje

Brzo

Dug radni vek

Niska stopa kvarova

Reduce Labor

Telekomunikacije
| Stavka | Domet | Max brzina | ||
| Arm | J1 | ±165° | 164°/s | |
| J2 | -95° /+70° | 149°/s | ||
| J3 | ±80° | 185°/s | ||
| Zglob | J4 | ±155° | 384°/s | |
| J5 | -130° /+120° | 396°/s | ||
| J6 | ±360° | 461°/s | ||
|
| ||||
| Dužina ruke (mm) | Mogućnost opterećenja (kg) | Ponovljena tačnost pozicioniranja (mm) | Izvor napajanja (kVA) | Težina (kg) |
| 1225 | 10 | ±0,07 | 4.30 | 155  1. Koje su prednosti kupovine profesionalne robotske ruke za poliranje? BORUNTE industrijski roboti za poliranje mogu poboljšati efikasnost proizvodnje, poboljšati kvalitet proizvoda, smanjiti troškove rada i rizike od ljudske greške, mogu raditi na visokim temperaturama, štetnim plinovima i drugim okruženjima kako bi osigurali sigurnije radno okruženje. 2. Kako odabrati industrijskog robota za poliranje koji odgovara vašim potrebama? Prilikom odabira robota treba uzeti u obzir sljedeće faktore: radno opterećenje, radni prostor, zahtjeve za preciznošću, radnu brzinu, sigurnosne zahtjeve, jednostavnost programiranja i rada, zahtjeve za održavanje i budžetska ograničenja. Istovremeno, treba obaviti i konsultacije sa dobavljačima i stručnjacima kako bi se dobili detaljniji prijedlozi. Značajne karakteristike robotske ruke za profesionalno poliranje: 1. Preciznost i ponovljivost: Rad poliranja obično zahtijeva visoko precizno kretanje i dosljedan rad. Industrijski roboti mogu pozicionirati i kontrolirati s milimetarskom preciznošću, osiguravajući dosljedne rezultate u svakoj operaciji. 2. Automatizacija i efikasnost: Jedna od glavnih svrha industrijskih robota je poboljšanje efikasnosti proizvodnje. Proces poliranja je obično glomazan i dugotrajan, ali roboti mogu obavljati zadatke na brz i dosljedan način, čime se poboljšava ukupna efikasnost proizvodne linije. 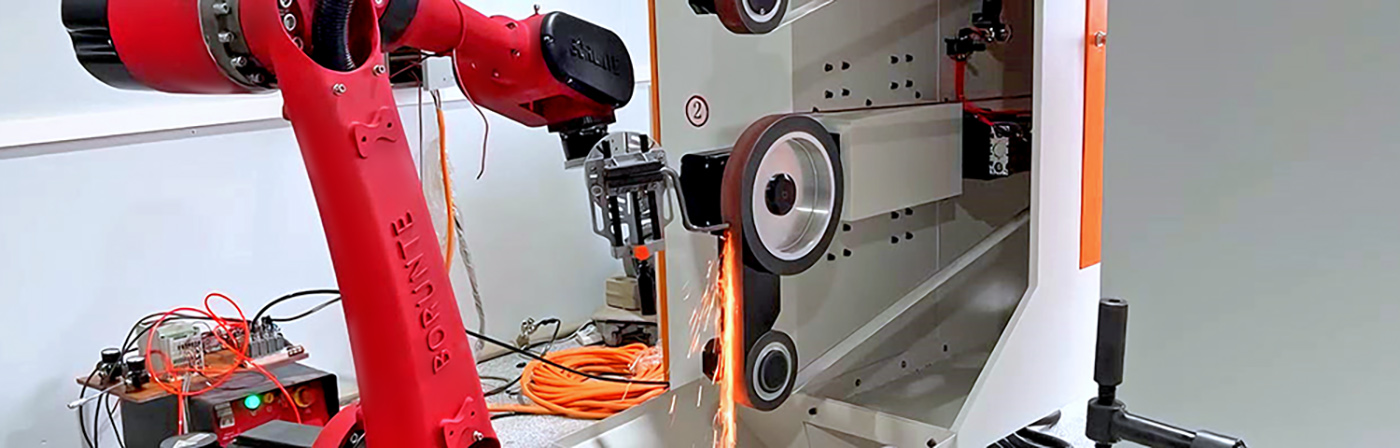  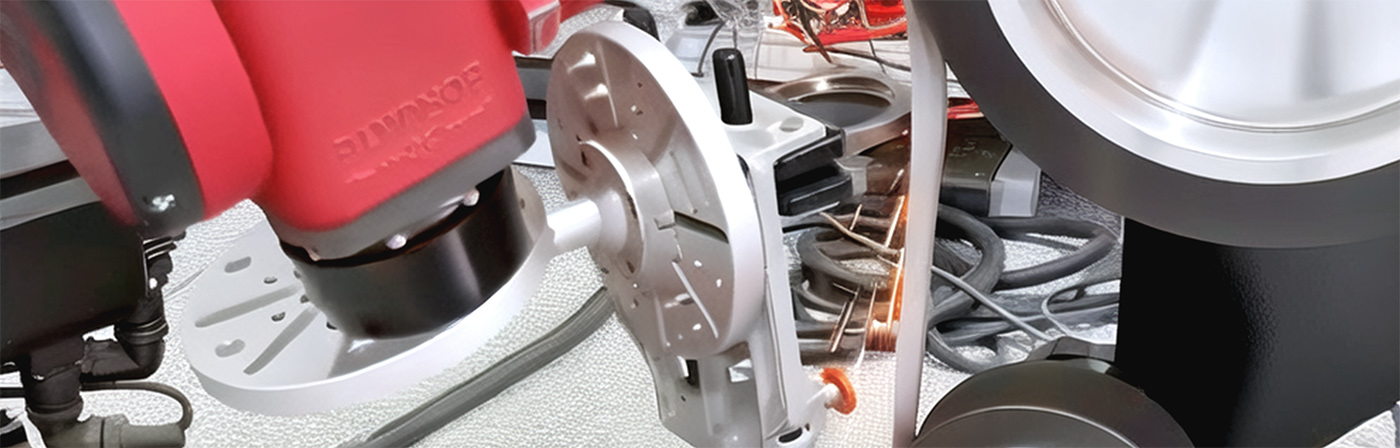 
Kategorije proizvodaBORUNTE i BORUNTE integratoriU ekosistemu BORUNTE, BORUNTE je odgovoran za istraživanje i razvoj, proizvodnju i prodaju robota i manipulatora. BORUNTE integratori koriste svoje prednosti u industriji ili na terenu kako bi osigurali dizajn terminalskih aplikacija, integraciju i postprodajne usluge za BORUNTE proizvode koje prodaju. Integratori BORUNTE-a i BORUNTE-a ispunjavaju svoje odgovornosti i nezavisni su jedni od drugih, radeći zajedno na promoviranju svijetle budućnosti BORUNTE-a.
© Autorsko pravo - 2010-2024 : Sva prava pridržana.Sitemap - AMP Mobile Pneumatsko plutajuće pneumatsko vreteno, Spužvaste gumene čašice, Pneumatsko plutajuće električno vreteno, Kompenzator položaja aksijalne sile, Nemagnetski razdjelnik, 2D vizuelni sistem,
|