




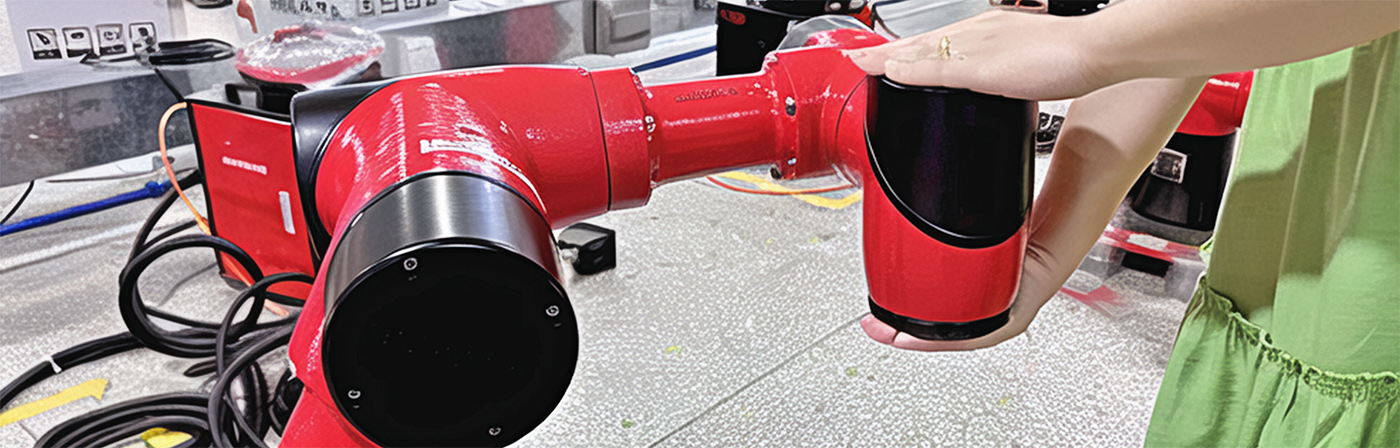
BRTIRXZ0805A - гэта шасцівосевы кааператыўны робат з функцыяй навучання перацягванню, незалежна распрацаваны BORUNTE. з максімальнай нагрузкай 5 кг і максімальнай даўжынёй рукі 930 мм. Ён мае функцыі выяўлення сутыкненняў і прайгравання дарожкі. Ён бяспечны і эфектыўны, разумны і просты ў выкарыстанні, гнуткі і лёгкі, эканамічны і надзейны, мае нізкае энергаспажыванне і іншыя характарыстыкі, якія ў значнай ступені адпавядаюць патрэбам чалавека-машыннага супрацоўніцтва. Яго высокая адчувальнасць і хуткая рэакцыя могуць прымяняцца да гнуткай вытворчай лініі высокай шчыльнасці, каб задаволіць патрэбы ўпакоўкі прадукцыі, ліцця пад ціскам, пагрузкі і разгрузкі, зборкі і іншых аперацый, асабліва для сумеснай працы чалавек-машына. Ступень абароны дасягае IP50. Пыланепранікальны і воданепранікальны. Дакладнасць паўторнага пазіцыянавання складае ±0,1 мм.

Дакладнае пазіцыянаванне

Хуткі

Доўгі тэрмін службы

Нізкі ўзровень адмоваў

Паменшыць працу

Тэлекамунікацыі
| Пункт | Дыяпазон | Максімальная хуткасць | ||
| рука | J1 | ±180° | 180°/с | |
| J2 | ±90° | 180°/с | ||
| J3 | -70°~+240° | 180°/с | ||
| Запясце | J4 | ±180° | 180°/с | |
| J5 | ±180° | 180°/с | ||
| J6 | ±360° | 180°/с | ||
|
| ||||
| Даўжыня рукі (мм) | Грузападымальнасць (кг) | Паўторная дакладнасць пазіцыянавання (мм) | Крыніца харчавання (кВА) | Вага (кг) |
| 930 | 5 | ±0,05 | 0,76 | 28 |

Асаблівасці BRTIRXZ0805A
1. Супрацоўніцтва чалавека і машыны больш бяспечнае: убудаваны высоканадзейны датчык крутоўнага моманту з функцыяй выяўлення сутыкненняў можа эфектыўна забяспечваць бяспеку супрацоўніцтва чалавека і машыны без неабходнасці ізаляцыі агароджы, значна эканомячы месца.
2.Лёгкае кіраванне і навучанне перацягвання: праграмаванне можа быць дасягнута шляхам перацягвання траекторыі або з выкарыстаннем 3D візуальна адчувальнай запісу мэтавай траекторыі, якая простая і лёгкая ў выкарыстанні;
3. Лёгкая, партатыўная і простая канструкцыя: увесь робат, распрацаваны з лёгкай канструкцыяй, важыць менш за 35 кг і абсталяваны высокаінтэграваным модулем, што значна спрашчае ўнутраную структуру корпуса і палягчае разборку і зборку.
4.Эканамічна і эфектыўна: прыгожы дызайн робата і нізкі кошт. Ён адрозніваецца нізкімі першапачатковымі інвестыцыямі, высокай эканамічнай эфектыўнасцю, гнуткімі і плаўнымі рухамі і максімальнай хуткасцю 2,0 м/с.
5. Функцыі бяспекі: пашыраныя функцыі бяспекі, такія як выяўленне сутыкненняў і маніторынг сілы, часта інтэграваныя ў гэтыя робаты, забяспечваючы бяспечную працу ў непасрэднай блізкасці ад людзей, якія працуюць. Гэта робіць іх прыдатнымі для калабарацыйных робатаў (каботаў), дзе людзі і робаты працуюць разам.
Умовы працы BRTIRXZ0805A
1、Крыніца сілкавання: Шафа кіравання AC: 220V±10% 50HZ/60HZ, корпус пастаяннага току: 48V±10%
2、Працоўная тэмпература: 0 ℃-45 ℃; Тэмпература ўдару: 15 ℃-25 ℃
3、Адносная вільготнасць: 20-80% адноснай вільготнасці (без кандэнсацыі)
4、Шум: ≤75 дБ (A)



-
Супрацоўніцтва чалавека і машыны
-

Ліццё пад ціскам
-

транспарт
-
зборка





BORUNTE і інтэгратары BORUNTE
У экасістэме BORUNTE BORUNTE адказвае за даследаванні і распрацоўкі, вытворчасць і продаж робатаў і маніпулятараў. Інтэгратары BORUNTE выкарыстоўваюць свае галіновыя або палявыя перавагі для распрацоўкі тэрмінальных прыкладанняў, інтэграцыі і пасляпродажнага абслугоўвання прадуктаў BORUNTE, якія яны прадаюць. BORUNTE і інтэгратары BORUNTE выконваюць адпаведныя абавязкі і не залежаць адзін ад аднаго, працуючы разам, каб прасоўваць светлую будучыню BORUNTE.
- Тэл.: +86-400-870-8989
- NO.83, Шафу-роўд, вёска Шабу, горад Даланг, горад Дунгуань, правінцыя Гуандун, Кітай
- borunterobotcoltd@gmail.com



Пнеўматычны плавае пнеўматычны шпіндзель, 2D візуальная сістэма, Немагнітны разветвитель, Губчатыя прысоскі, Кампенсатар становішча восевай сілы, Пнеўматычны плавае электрычны шпіндзель,
-

вр
-

электронная пошта
-

Тэлефон
-

WhatsApp
-

Топ