



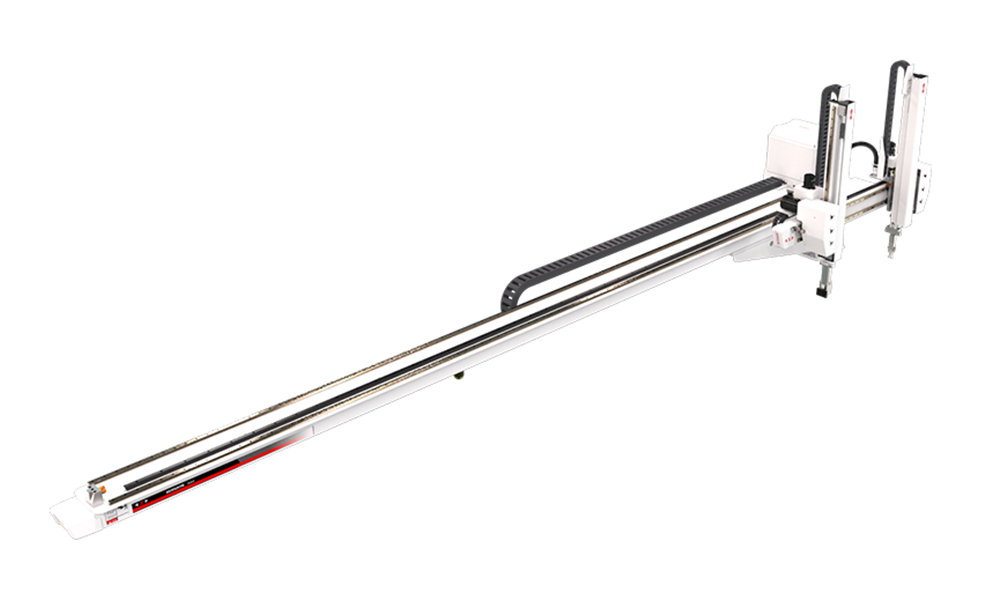
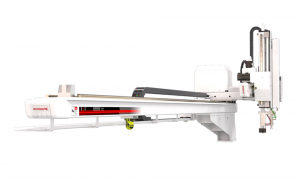
BRTV13WDS5P0/F0 ተከታታይ ለሁሉም አይነት አግድም መርፌ ማሽን ክልሎች 320T-700T ለመውጣት ምርቶች እና ስፕሩስ ይሠራል። መጫኑ ከተለምዷዊ የጨረር ሮቦቶች የተለየ ነው, ምርቶች በመርፌ መስጫ ማሽኖች መጨረሻ ላይ ይቀመጣሉ. ድርብ ክንድ አለው። ቀጥ ያለ ክንድ ቴሌስኮፒ ደረጃ ሲሆን ቀጥ ያለ ምት 1300 ሚሜ ነው. ባለ አምስት ዘንግ AC servo ድራይቭ። ከተጫነ በኋላ የኤጀንተሩን የመትከል ቦታ በ 30-40% ማዳን ይቻላል, እና ተክሉን በተሻለ ሁኔታ ጥቅም ላይ ሊውል ይችላል የምርት ቦታን በተሻለ ሁኔታ መጠቀም, ምርታማነት በ 20-30% ይጨምራል, ጉድለቱን ይቀንሳል, የኦፕሬተሮችን ደህንነት, የሰው ኃይልን ይቀንሳል እና ቆሻሻን ለመቀነስ ውጤቱን በትክክል ይቆጣጠሩ. ባለ አምስት ዘንግ ሾፌር እና ተቆጣጣሪ የተቀናጀ ስርዓት: ጥቂት የሲግናል መስመሮች, የርቀት ግንኙነት, ጥሩ የማስፋፊያ አፈፃፀም, ጠንካራ ፀረ-ጣልቃ ገብነት ችሎታ, ተደጋጋሚ አቀማመጥ ከፍተኛ ትክክለኛነት, በአንድ ጊዜ ብዙ መጥረቢያዎችን, ቀላል መሳሪያዎችን ጥገና እና ዝቅተኛ ውድቀትን መቆጣጠር ይችላል.

ትክክለኛ አቀማመጥ

ፈጣን

ረጅም የአገልግሎት ሕይወት

ዝቅተኛ ውድቀት ደረጃ

የጉልበት ሥራን ይቀንሱ

ቴሌኮሙኒኬሽን
| የኃይል ምንጭ (kVA) | የሚመከር አይኤምኤም (ቶን) | ተሻጋሪ መንዳት | የ EOAT ሞዴል |
| 3.40 | 320ቲ-700ቲ | AC Servo ሞተር | ሁለት መምጠጥ ሁለት ቋሚዎች |
| ትራቨርስ ስትሮክ (ሚሜ) | ተሻጋሪ ስትሮክ (ሚሜ) | አቀባዊ ስትሮክ (ሚሜ) | ከፍተኛ ጭነት (ኪግ) |
| አግድም ቅስት በጠቅላላው ከ 6 ሜትር ባነሰ ርዝመት | በመጠባበቅ ላይ | 1300 | 8 |
| የደረቅ መውጫ ጊዜ (ሰከንድ) | ደረቅ ዑደት ጊዜ (ሰከንድ) | የአየር ፍጆታ (NI/ዑደት) | ክብደት (ኪግ) |
| 2.3 | በመጠባበቅ ላይ | 9 | መደበኛ ያልሆነ |
የሞዴል ውክልና፡ W: ቴሌስኮፒክ አይነት መ: የምርት ክንድ + ሯጭ ክንድ። S5፡ ባለ አምስት ዘንግ በኤሲ ሰርቮ ሞተር (Traverse-axis፣ Vertical-axis+ Crosswise-axis) የሚመራ።
ከላይ የተጠቀሰው የዑደት ጊዜ የኩባንያችን የውስጥ የሙከራ ደረጃ ውጤቶች ናቸው። በማሽኑ ትክክለኛ የትግበራ ሂደት እንደ ትክክለኛው አሠራር ይለያያሉ.

| A | B | C | D | E | F | G | O |
| በ1614 ዓ.ም | ≤6ሚ | 162 | በመጠባበቅ ላይ | በመጠባበቅ ላይ | በመጠባበቅ ላይ | 167.5 | 481 |
| H | I | J | K | L | M | N | P |
| 191 | በመጠባበቅ ላይ | በመጠባበቅ ላይ | 253.5 | 399 | በመጠባበቅ ላይ | 549 | በመጠባበቅ ላይ |
| Q | |||||||
| 1300 | |||||||
መግለጫው እና መልክው በመሻሻል እና በሌሎች ምክንያቶች ከተቀየረ ምንም ተጨማሪ ማስታወቂያ የለም። ስለ መረዳትህ እናመሰግናለን።

1. ግዛት መቀየር
የፕላስቲክ መርፌ የሚቀርጸው manipulator ክንድ የማስተማር pendant ሦስት ሁኔታዎች አሉት: ማንዋል, ማቆም እና ራስ. [በእጅ]፡ ወደ ማኑዋል ሁነታ ለመግባት የግዛት ማብሪያውን ወደ ግራ ያንቀሳቅሱት። [አቁም]፡ ወደ ማቆሚያ ሁኔታ ለመግባት፣ የግዛት ማብሪያ / ማጥፊያውን ወደ መሃል ያንቀሳቅሱት። በዚህ ደረጃ መለኪያዎች ሊዘጋጁ ይችላሉ. (ራስ-ሰር): ወደ አውቶማቲክ ሁኔታ ለመግባት የስቴት ማብሪያ / ማጥፊያውን ወደ መሃል ያንቀሳቅሱት። በዚህ ሁኔታ አውቶማቲክ እና ተጓዳኝ ቅንጅቶች ሊከናወኑ ይችላሉ.
2. የተግባር አዝራሮች
[ጀምር] አዝራር:
ተግባር 1፡ በአውቶ ሞድ ውስጥ ማኒፑላተሩን በራስ ሰር ለመጀመር “ጀምር”ን ተጫን።
ተግባር 2፡ በማቆሚያው ሁኔታ ማኒፑላተሩን ወደ መጀመሪያው ለመመለስ “ኦሪጅንን” እና በመቀጠል “ጀምር” ን ይጫኑ።
ተግባር 3፡ በማቆሚያ ግዛት ውስጥ የማኒፑሌተሩን አመጣጥ ለመመለስ "HP" እና በመቀጠል "ጀምር" ን ይጫኑ።
[አቁም] አዝራር፡-
ተግባር 1: በአውቶ ሞድ ውስጥ "Stop" ን ይጫኑ እና ሞጁሉ ሲጠናቀቅ አፕሊኬሽኑ ይቆማል. ተግባር 2፡ ማንቂያ በሚፈጠርበት ጊዜ በአውቶ ሞድ ላይ "አቁም" የሚለውን መታ ያድርጉ መፍትሄ የተገኘለትን የማንቂያ ደወል ለማጥፋት።
[ኦሪጅናል] አዝራር፡ የሚመለከተው ለሆሚንግ ድርጊቶች ብቻ ነው። እባክዎን ክፍል 2.2.4 "የሆሚንግ ዘዴ" ይመልከቱ።
[HP] ቁልፍ፡ “HP”ን ተጫን እና በመቀጠል “ጀምር ሁሉም መጥረቢያዎች በ Y1 ፣ Y2 Z ፣ X1 እና X2 ፣ Y1 እና Y2 ወደ 0 ይመለሳሉ ፣ እና Z ፣ X1 እና X2 ወደ መጀመሪያው ይመለሳሉ። የፕሮግራሙ አቀማመጥ.
[የፍጥነት ወደላይ/ወደታች] አዝራር፡- እነዚህ ሁለት አዝራሮች የአለምን ፍጥነት በማኑዋል እና አውቶማቲክ ሁኔታ ለማስተካከል ሊያገለግሉ ይችላሉ።
[የአደጋ ጊዜ ማቆሚያ] ቁልፍ፡ በድንገተኛ ጊዜ "የአደጋ ጊዜ ማቆሚያ" ቁልፍን መጫን ሁሉንም መጥረቢያዎች ያጠፋል እና "የአደጋ ጊዜ ማቆሚያ" ማንቂያውን ያሰማል. ማንበቢያውን ካስወገዱ በኋላ ማንቂያውን ጸጥ ለማድረግ "አቁም" የሚለውን ቁልፍ ይጫኑ።

-

መርፌ መቅረጽ





BORUNTE እና BORUNTE መጋጠሚያዎች
በBORUNTE ስነ-ምህዳር ውስጥ፣ BORUNTE ለሮቦቶች እና ማኒፑላተሮች R&D፣ ምርት እና ሽያጭ ሀላፊነት አለበት። BORUNTE integrators ለሚሸጡት BORUNTE ምርቶች ተርሚናል አፕሊኬሽን ዲዛይን፣ ውህደት እና ከሽያጭ በኋላ አገልግሎት ለመስጠት የኢንዱስትሪ ወይም የመስክ ጥቅሞቻቸውን ይጠቀማሉ። BORUNTE እና BORUNTE ተዋናዮች የየራሳቸውን ሀላፊነት ይወጣሉ እና አንዳቸው ከሌላው ነፃ ሆነው የ BORUNTEን ብሩህ የወደፊት ተስፋ ለማስተዋወቅ በጋራ ይሰራሉ።
- ስልክ፡+86-400-870-8989
- NO.83፣ ሻፉ መንገድ፣ ሻቡ መንደር፣ ዳላንግ ከተማ፣ ዶንግጓን ከተማ፣ ጓንግዶንግ ግዛት፣ ቻይና
- borunterobotcoltd@gmail.com



የስፖንጅ መምጠጥ ኩባያዎች, 2D ምስላዊ ስርዓት, የ Axial Force አቀማመጥ ማካካሻ, Pneumatic ተንሳፋፊ pneumatic ስፒል, Pneumatic ተንሳፋፊ የኤሌክትሪክ ስፒል, መግነጢሳዊ ያልሆነ መለያያ,
-

ቁ
-

ኢሜይል
-

ስልክ
-

WhatsApp
-

ከፍተኛ